示例:文件结束 EtherCAT
产品:CODESYS EtherCAT
描述
此示例展示了如何通过 CAN 读取和写入 SDO EtherCAT 以及使用 File over 下载固件文件 EtherCAT。它还展示了如何获取有关主站和从站的信息,例如活动从站的数量或从站的状态。作为硬件,使用了两个带有 CAN over EtherCAT 的模拟终端。 File-over-EtherCAT 功能是理论上实现的,无需硬件。
附加信息
您可以为设备配置设置各种启动参数。对于使用 CAN over EtherCAT 的设备,每个参数都使用索引和子索引。对于每个参数,您可以将值读取或写入为数字或最多四个字节的字节数组。
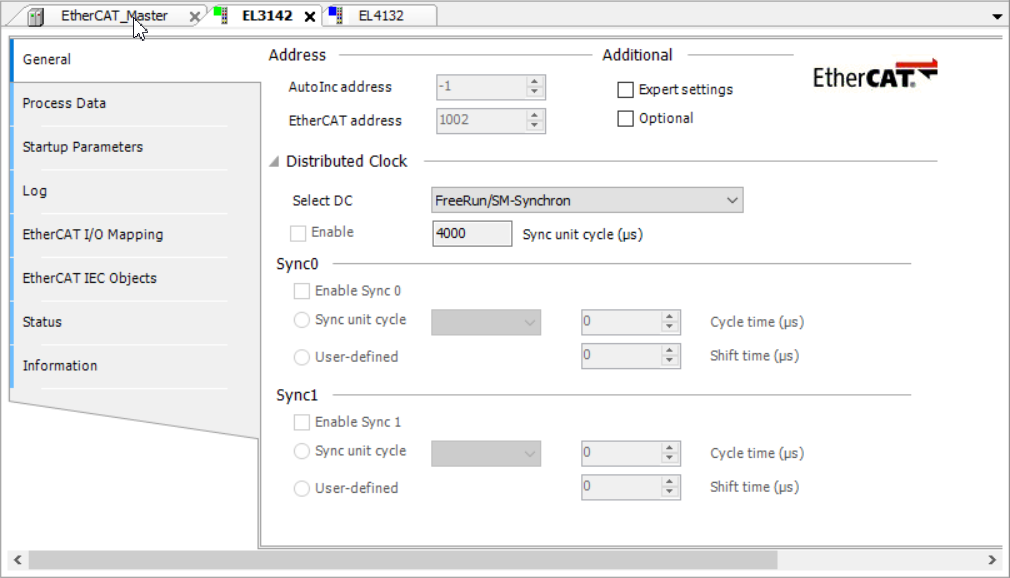 |
参数为 EL4132 和 EL3142 是在启动前设置的。通过双击这些设备之一, 启动参数 显示选项卡。已设置一个启动参数,您可以使用 新的 按钮可选择更多启动参数。这 一般的 选项卡显示 EtherCAT 地址稍后用于选择设备。在里面 EtherCAT_主站 选项卡下的 一般的 选项卡中,您需要设置设备连接的正确源地址。
 |
CoE:首先,该程序必须等到 EtherCAT 师父已经准备好了。之后,已设置的参数以字节数组的形式从设备 1002 中读取,并作为 DWORD。另外,之后写入和读取四个字节的参数。本例中还写入了大于四个字节的参数。
到目前为止,仅使用了参数值,但您也可以将完整的条目读取到字节数组中。这些值是特定于设备的。所有功能块都包含一个 udiSdoAbort 多变的。如果取消操作,则此变量返回中止代码。该代码的错误可以在 CANopen 规范中找到。
FoE:该函数展示了如何使用 File over EtherCAT 下载虚构的固件。之后 EtherCAT 主控已准备就绪,将为完整固件分配内存。然后将特定从机设置为引导模式以下载固件。下载完成后,内存将被释放。
上传功能与固件示例没有直接关系。它只是为了展示如何调用实例。
系统要求和限制
编程系统 | CODESYS Development System (版本3.5.14.0或更高版本) |
运行时系统 | CODESYS Control Win (版本3.5.14.0) |
附加组件 | - |
注意
 下载 项目
下载 项目