示例:伺服驱动器结束 EtherCAT
产品:CODESYS EtherCAT
描述
此示例说明如何使用 ServoDrive over 读取和写入 IDN EtherCAT。作为硬件,使用力士乐 IndraDrive。你也可以将设备与另一台使用 ServoDrive 的设备交换 EtherCAT。
附加信息
您可以在设备配置中设置多个启动参数。对于使用 ServoDrive 的设备,这些参数称为 IDN EtherCAT。对于每个 IDN,您可以将名称、属性、单位、最小值、最大值和值设置为数字或最多四个字节的字节数组。
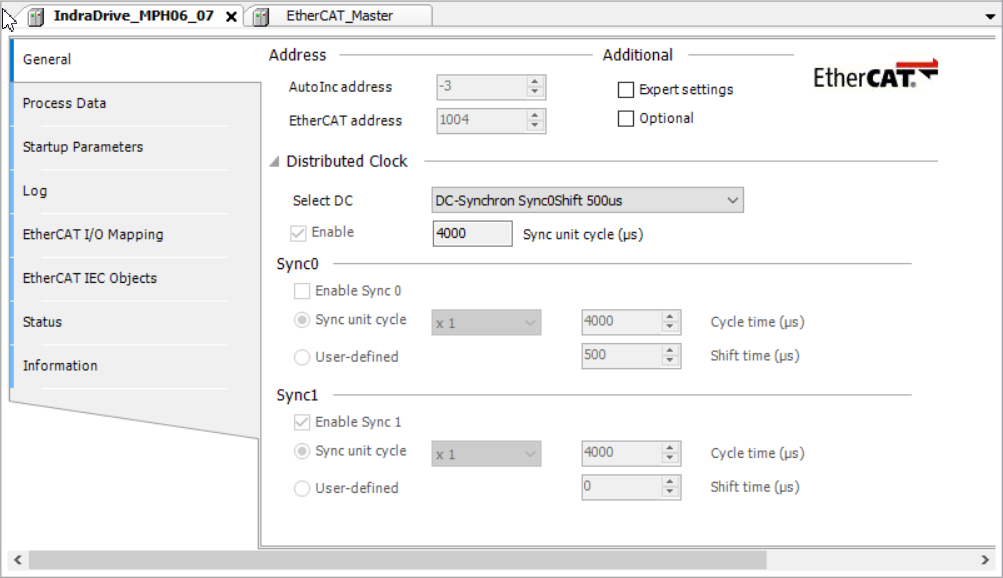 |
两个启动参数一开始就已经设置好了。看着那(这 启动参数 设备上的选项卡。这 一般的 选项卡显示 EtherCAT 用于选择设备的地址。为了 EtherCAT_Master 设备下的 一般的 选项卡中,您需要设置设备连接的正确源地址。
 |
SoE:首先,程序必须等到 EtherCAT 师父已经准备好了。然后,从设备中读取 IDN 号 32 1001 这在启动时就已经设置好了。此外,还将 IDN 写入设备,然后将其作为 UINT 值和字节数组再次读取一次。
您可以读取 IDN 的名称、属性、单位、最小值、最大值和值。为此,请使用特定值 byElem。这 ”byDrive" 未设置值,因为所使用的设备只有一个通道(=轴)。 EtherCAT 主控设置为 usiCom 以及地址 uiDevice。根据设备的不同,您可能需要将超时设置得足够高。
系统要求和限制
编程系统 | CODESYS Development System (版本3.5.14.0或更高版本) |
运行时系统 | CODESYS Control Win (版本3.5.14.0) |
附加组件 | - |
注意
 下载 项目
下载 项目