CODESYS Depictor 编辑(授权)
在许可和付费版本的 CODESYS Depictor 编辑器(可在 CODESYS 商店),您可以查看和编辑可用 Depictor 对象并用局部变量填充它们。
不同于以往 CODESYS Depictor 查看器,您还可以向树中添加新的姿势和元素,并在相应的属性视图中对其进行配置。 3D 视图显示了树中描述的整个结构。
不同于以往 CODESYS Depictor 观众, CODESYS Depictor 编辑器提供以下扩展:
这 CODESYS 主窗口包含一个带有命令按钮的附加工具栏,用于在 CODESYS Depictor 编辑。
属性编辑器提供了更多的编辑选项。
提供了一个界面编辑器 Depictor 位于 POU 看法。然后你可以在其他中引用这些类型的对象 Depictor 对象并相应地分配接口变量。
一种 相机 提供视图,您可以在其中管理 3D 视图的相机设置。然后通过 IEC 代码访问这些设置。
一种 灯光 提供了视图,您可以在其中配置多个光源来照亮 3D 视图。
一种 鸟瞰 提供视图,您可以在其中获得场景的概览。你看到 Depictor 物体、光源和相机。相机视图总是从上方(在场景的 z 轴上)。
您可以在 3D 视图中以圆柱体的形式显示姿势之间的父子关系。
在 3D 视图中工作:姿势、元素、相机位置和姿势连接
在 3D 视图中工作时,以下命令的按钮在 CODESYS 主窗口:
 | 添加姿势:在树中所选条目的下方添加一个姿势。 定义:A 摆姿势 显示其子节点相对于其父节点的平移。例如,所有子节点都应相对于父节点移动七个单位。 |
 | 添加元素:在树中选定条目的下方添加一个元素。 定义:一个 元素 在里面 CODESYS Depictor 包含 a 的实际 3D 几何 Depictor 目的。 3D 几何图形可以源自文件,也可以参考现有的 Depictor 目的。 |
 | 从渲染视图中获取相机位置并将其添加到 Depictor 的相机位置.对应命令 获取相机位置. |
 | 将Depictor中选择的相机位置设置为3D视图的相机位置: 对应命令 设置相机位置. 3D 视图中的表示会相应更改。 |
 | 创建屏幕截图: 默认 另存为 对话框打开。您可以将当前的 3D 视图保存到 |
 | 显示姿势连接:所有元素在 3D 视图中绘制为线模型。姿势之间的连接显示为绿色圆柱体。圆柱体的厚度定义在 Depictor 选项. 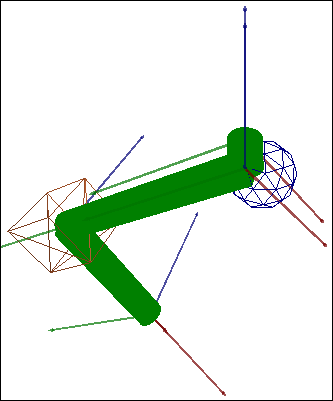 |
命令 添加姿势 和 添加元素 在对象的上下文菜单中可用 树 看法。
特性 姿势视图
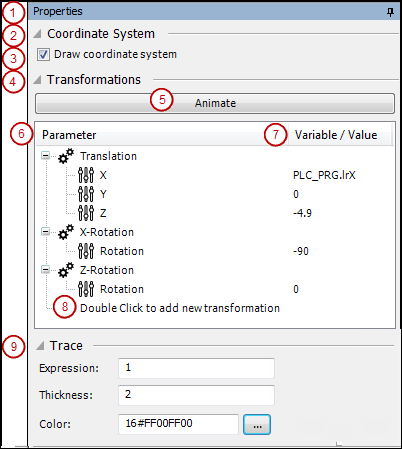
该图显示了编辑器视图 特性 (1) 具有样本值的姿势。
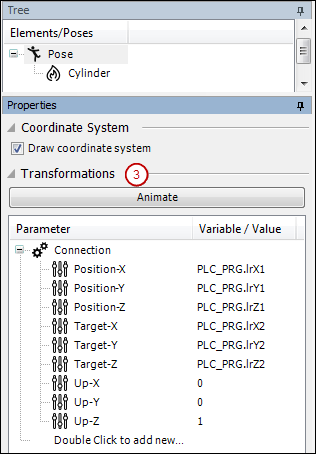
坐标系 (2), 绘制坐标系 (3):当您为姿势选择此选项时,位置和变换的坐标系将连续显示,而与树结构中的选择无关。
发布姿势:此选项仅适用于 POU 池中的对象。激活该选项后,姿势会立即出现在所有引用 Depictor 目的。您可以单独修改姿势并在其下方包含您自己的元素。
按钮 动画 (5):在 3D 视图中以定义的顺序对姿势的所有变换进行动画处理。中定义的值 价值 列在一秒内从
0要么1到下一个达到的值。通过这种方式,很容易在 3D 视图中看到每个变换如何影响模型。转型 (4):在下表中,您按照执行顺序(从上到下)找到姿势的所有翻译。
范围 第 (6) 列:转换类型及其属性
值/变量 第 (7) 列:描述相应转换属性的值、变量或表达式。在离线模式下, CODESYS Depictor 尝试直接计算表达式并确定一个值。在在线模式下,表达式是实时计算的。如果一个表达式不能被计算(离线或在线)或者它是空的,那么 CODESYS Depictor 尝试使用先前确定的值并最终使用
0(要么FALSE)。您可以编辑 值/变量 柱子。除了变量和来自两者组合的 IEC 表达式(例如:“
q + p*2 + 5"). 对于表达式,您可以使用全局 IEC 变量或来自关联接口的变量 Depictor POU 池中的对象。在选定转换的上下文菜单中,命令可用于 提升 要么 下移 表内,以及复制或删除。
可以在表的末尾添加一个额外的转换: 双击添加新的转换 (8)。列表框提供了可能的转换类型:
平移 (X/Y/Z)
X-旋转
Y 轴旋转
Z-旋转
缩放 (X/Y/Z)
结合 (结构):通过指定结构化变量来组合平移和旋转,而不是使用特定的 X/Y/Z 参数。为此,您可以使用框架变量定义结构
X,Y,Z,Pitch,Yaw, 和Roll.作为替代方案,您可以使用DepictorFrame从结构DepictorBase图书馆。请参阅以下示例:联系:此转换类型用于创建在两点之间的空间中拉伸的元素,并且其移动应自动适应。例如,这是一个动态进出的机械臂。为此,您只需指定有限空间点的位置和方向向量。然后 CODESYS Depictor 计算连接元素的位姿并自动缩放。姿势属性中指定了以下值。它们为插入树中姿势下方的连接线定义了自己的坐标系。
原点位置: 位置 X, 位置 Y, 位置 Z
目标位置: 目标 X, 目标 Y, 目标 Z
方向: 向上 X, 向上 Y, 向上 Z (向上矢量)
请参阅以下示例:
痕迹 (9):通过这些属性,您可以定义是否以及如何绘制 TCP 的轨迹。
表达: 表达式或常数 (
0:没有绘制路径;1:绘制路径;2:删除路径)行宽: 绘制路径的线宽
颜色: 绘制路径的颜色
DepictorFrameTYPE DepictorFrame :
STRUCT
X : LREAL;
Y : LREAL;
Z : LREAL;
Yaw : LREAL;
Pitch : LREAL;
Roll : LREAL;
END_STRUCT
END_TYPE
PROGRAM PLC_PRG
VAR
rCount : LREAL;
depFram : DepictorBase.DepictorFrame;
END_VAR
rCount := rCount + 0.01;
depFram.X := COS(rCount)*4;
depFram.Y := SIN(rCount)*4;
depFram.Z := COS(rCount) * SIN(rCount) * 4;
depFram.Yaw := rCount*4;
depFram.Pitch := rCount*8;
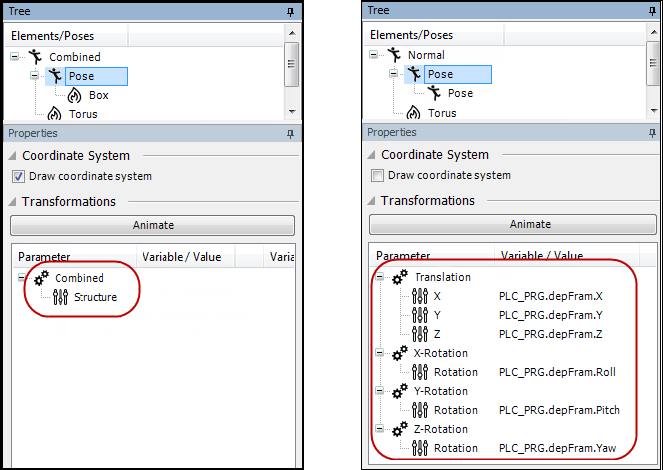
depFram.Roll := rCount*12;编辑器中的条目:配置表 转型 姿势,类型 结合, 柱子 变量/值: PLC_PRG.depFram
有关结构上方的组合变换配置(左)和平移和旋转的各个参数上方的等效配置(右),请参见下图:
这 CODESYS Depictor 应显示伸缩气缸的运动。空间中的运动和圆柱体长度的变化应自动适应空间中两点的当前位置。为此,您对圆柱体位姿使用变换类型“连接”,并指定空间点和方向矢量。然后,圆柱体所需的不断平移由下式自动计算 CODESYS Depictor.
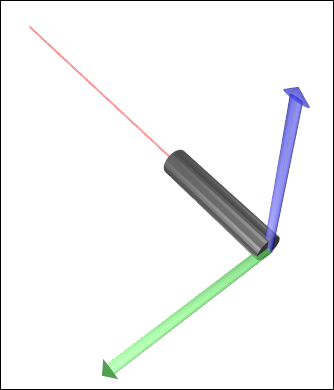
你创建一个“Cylinder" 中某个姿势下方的元素 树 的 Depictor 对象 (1)。
那么元素是 Depictor 从图书馆参考。
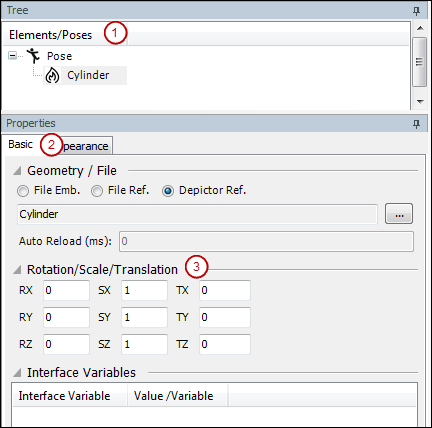
配置 圆筒 中的元素 特性 观点(2)如下:
在里面 基本的 选项卡(2),设置变换(3):
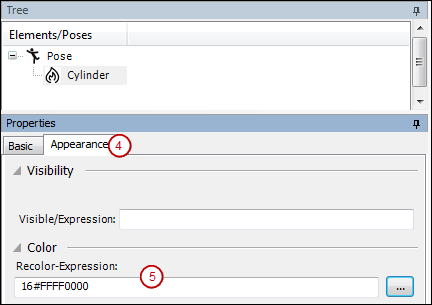
在里面 外貌 选项卡(4),设置颜色(5):
然后配置姿势 圆筒 在里面 属性/转换 观点(3)如下:
控制一个运动 Depictor 通过应用程序对象
应用,PLC_PRG
PROGRAM PLC_PRG
VAR
lrRun : LREAL;
lrX1 : LREAL := 0;
lrY1 : LREAL;
lrZ1 : LREAL;
lrX2 : LREAL := 2;
lrY2 : LREAL;
lrZ2 : LREAL;
END_VARlrRun := lrRun + 0.01; lrX1 := COS(lrRun)*2; lrX2 := SIN(lrRun)*2 + 2; lrY1 := SIN(lrRun*2)*3; lrY2 := COS(lrRun*2)*3; lrZ1 := COS(lrRun/2); lrZ2 := SIN(lrRun/2);
特性 元素视图
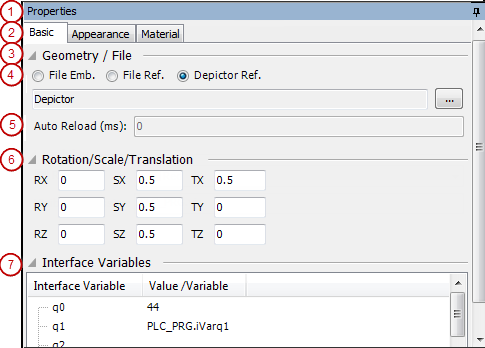
这 特性 编辑 (1) Depictor 元素由选项卡组成 基本的 和 外貌.对于不属于 Depictor 参考资料,还有 材料 标签。
基本的 选项卡 (2):
定义几何源并为元素设置额外的 X/Y/Z 变换。如果元素来自 Depictor 定义接口的引用,然后您可以执行 接口变量 (9) 在表中。有关详细信息,请参阅 CODESYS Depictor 观众。
几何/文件 (3):元素几何源的选择
文件嵌入。 (4):嵌入的3D文件
文件参考。 (4):参考的3D文件;在设定的时间后重新加载 自动重新加载.
Depictor 参考。 (4): 引用 Depictor 目的
要选择文件,请单击
 按钮打开用于打开文件的默认对话框。 CODESYS 目前支持以下文件格式:
按钮打开用于打开文件的默认对话框。 CODESYS 目前支持以下文件格式:COLLADA(.dae)注意:与相关的纹理文件
COLLADA- 必须与 COLLADA 文件位于同一目录中。波前 (
.obj)3D工作室 (
.3ds)多边形文件格式(
.ply)
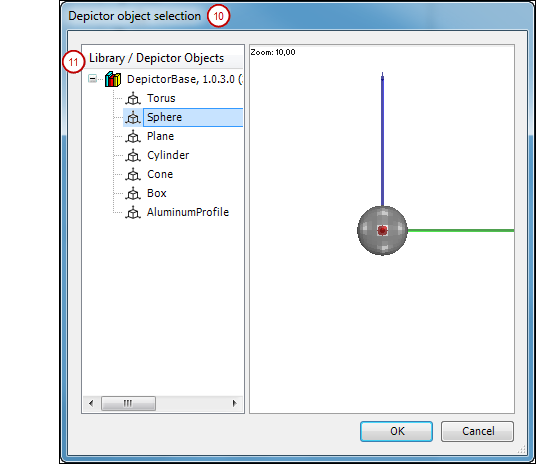
这 描述对象选择 对话框打开选择一个 Depictor 参考文献(10):
全部 Depictor 直接或作为库插入 POU 池中的对象显示在左侧 (11)。单击对象条目可在右侧打开项目预览。预览的工作方式与视图中的其他 3D 视图相同。 CODESYS Depictor 编辑器(或 CODESYS Depictor 观众)。点击 好的 引用选定的对象。
请注意以下选项:您可以从对象的属性编辑器在 POU 池中“发布”单个姿势。当您从元素的池中引用此类对象时,已发布的姿势会出现在树中的元素下方,并且仍然可以单独调整。例如,这允许以后在所有使用领域中添加和定制更多已定义基础关节臂机器人的夹具。
自动重新加载(5):仅当几何源为类型时可用 文件参考。.重新加载引用文件的时间间隔(以毫秒为单位)
平移/旋转/缩放 (6):您可以为元素定义额外的静态 X/Y/Z 变换。为此,请在文本字段中指定数值:
翻译:德克萨斯州, 泰, 太极
回转: 接收, RY, RZ
规模: SX, SY, 深圳
接口变量 (7):操作见帮助页面 CODESYS Depictor 查看器:“查看‘属性’”。
外貌 选项卡 (1):
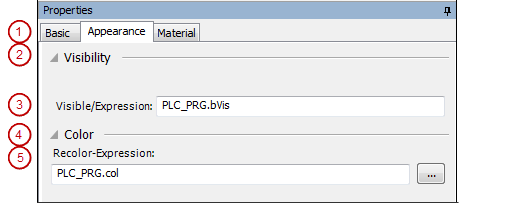
能见度 (2): 可见/表达 (3):当指定布尔变量或 表达 申请或 Depictor 对象为真。
颜色 (4): 重新着色表达式 (5):元素完全使用此处指定的颜色重新着色。既不使用纹理,也不使用参考的已知颜色 CODESYS Depictor 对象。要指定颜色,您可以提供类型的应用程序变量 STRING (例子: Application.PLC_PRG.strCol)或确切的颜色值(例如: 16#FFFF8040)。要打开颜色选择的默认对话框,请单击输入字段后的按钮。注意:重新着色不会影响已发布姿势以下的元素。
材料 选项卡 (1):
此选项卡仅适用于未插入的元素 Depictor 参考。
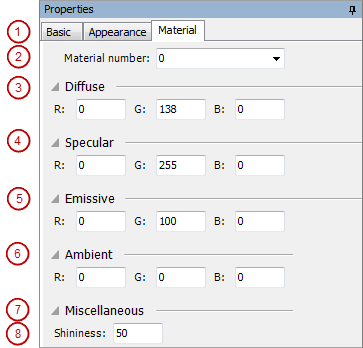
料号 (2):指定模型中的材料
可以在此处修改以下材料属性:
扩散
镜面反射
发光的
周围的
光泽度
描述器中的对象 CODESYS Application Composer
在 CODESYS Application Composer,您可以将声明的模块链接到 Depictor 对象。这允许将模块树显示为 3D 模型。
界面 一个视图 Depictor POU 池中的对象
您可以创建一个接口 Depictor 位于项目的 POU 池中的对象。当您在 CODESYS Depictor 编辑,另一个 界面 视图可用,默认情况下隐藏为编辑器左边缘的选项卡。它包含 Depictor 声明编辑器。
声明输入变量 Depictor 对象,就像通常的功能块一样 CODESYS.接口中声明的每个变量在 Depictor 对象,例如与姿势变换相关联。当你参考 Depictor 树中元素中的对象 (描述器参考。),变量列在 接口变量 属性编辑器的部分。您可以在其中使用用例的值或表达式填充它们。
提示
填充接口变量是可能的 CODESYS Depictor 观看者和 CODESYS Depictor 编辑。
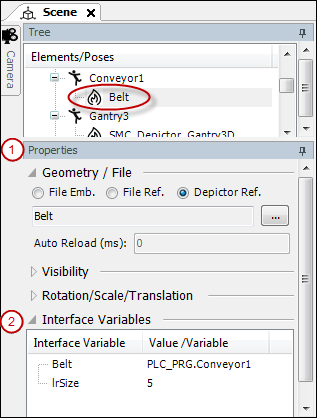
一种 Depictor 在项目的POU池中创建名为“Belt”的对象,接口定义如下:
VAR_INPUT
Belt: Conveyor;
lrSize: LREAL;
END_VAR在引用“Belt”对象时 Depictor 元素,您可以在该部分的属性编辑器 (1) 中使用值或应用程序变量填充变量 接口变量 (2):
相机 看法
这  相机 视图有两个部分: 相机位置 和 相机属性:
相机 视图有两个部分: 相机位置 和 相机属性:
“相机位置”部分
在 3D 视图中使用的相机位置 CODESYS Depictor 对象按对象列出保存。位置可以从 3D 视图应用到对话框中,也可以从对话框应用到视图中。使用隐式变量,您可以访问 IEC 代码中的相机位置。
摄像机位置定义为:
指数: 整数编号开始于
0眼睛:相机位置的矢量坐标
目标:相机目标
向上:摄像机的视角
除标准命令(删除、剪切、粘贴和复制)外,选定摄像机位置的上下文菜单还包含以下命令。
 向上移动凸轮位置:将表格中的位置上移一个单位
向上移动凸轮位置:将表格中的位置上移一个单位 向下移动凸轮位置: 将表格中的位置向下移动一个单位
向下移动凸轮位置: 将表格中的位置向下移动一个单位- 获取相机位置:如果 3D 视图允许直接交互,则在 3D 视图中检测到的相机位置会列在 相机 看法。
- 设置相机位置:如果 3D 视图允许直接交互,则在相机位置列表中选择的位置将在 3D 视图中设置。 3D 视图会相应地进行调整。
从 IEC 代码访问摄像机位置:
如果库的版本为 1.0.1.0 或更高版本 DepictorBase 链接在您的项目中,然后每个 CODESYS Depictor 对象自动生成 GVL <name of Depictor object> 与 Camera 多变的。
这 Camera 变量包含子组件 Position 类型 DepictorBase.DepictorCameraPosition 和 xUsePosition 类型 BOOL.视个人配置而定 Depictor 目的, Camera 也可能包含一个数组 pCameraPositions 类型 ARRAY ... OF DepictorBase.DepictorCameraPosition.该数组描述了对象的定义相机位置。数组中摄像机位置的数量由变量定义 uiNumberOfCameraPosition 类型 UINT.
使用这些隐式变量,您可以使用 IEC 代码控制相机。创建代码时,使用“List Components”函数来访问子组件 <Depictor object>.Camera.来自 IEC 代码的位置信息仅在您设置时使用 xUsePosition 到 TRUE, 然后在 3D 视图中不再可能进行直接交互。由视图周围的红框表示。
图书馆同时收到 InterpolateCameraPosition 功能块和 DepictorCameraPosition 用于定义相机位置的结构,。该块用于插值到一个新的 DepictorCameraPosition 在规定的时间内。这允许在设置新位置后立即进行动画相机运动。
“场景背景”部分
背景颜色 | 场景背景的颜色;可以在默认的颜色列表框中设置 |
使用以下纹理激活 Skydome |
|
导入纹理 | 打开用于选择纹理文件的默认对话框。可能的文件类型: |
清晰的纹理 | 指定的纹理文件将从设置中删除。 |

部分 相机属性
使用相机自动 |
|
收盘价 | 如果一个对象比该层更近,则不再显示它。 |
远层 | 如果对象比该层更远,则不再显示。 |
视野 (FOV) | 视野:相机的打开角度。 |
灯光 看法
在照明视图中,您可以配置多个光源来照明 3D 视图中的场景。每个光源在表中显示为一个节点,其属性位于其下方。
为此,另见下文: 3D 视图、鸟瞰图和照明配置示例.
使用自动照明 | 六个光源自动放置在 3D 对象周围的 X/Y/Z 轴上,以便根据使用的材料对场景进行最佳照明。 |
光/属性 | 价值 |
|---|---|
灯型 | 光源类型
|
位置 | 坐标系中光源的 X/Y/Z 值(例如, |
漫反射颜色 | 照明中漫射光的颜色;例子: |
高光颜色 | 照明中镜面光的颜色(例如, |
环境颜色 | 照明中环境光的颜色(例如, |
半径 | 光的最大扩散半径 |
恒定衰减 | 光线在光线半径路径中的恒定衰减值 |
线性衰减 | 光线在光线半径路径中的线性衰落值 |
二次衰减 | 光半径路径中光的二次衰减值 |
方向 | 各种光源的光的方向 定向 和 点 |
衰减 | 光源类型“Spot”从内锥到外锥的路径中的光衰减 |
内锥 | 光源类型“Spot”的内部光锥半径 |
外锥 | 光源类型“Spot”的外光锥半径 |
a 的上下文菜单  除了标准命令(删除、剪切、粘贴和复制)之外,光源节点还包含以下命令。
除了标准命令(删除、剪切、粘贴和复制)之外,光源节点还包含以下命令。
 将灯光设置为相机位置/方向:光源的位置和方向包含与相机相同的值。
将灯光设置为相机位置/方向:光源的位置和方向包含与相机相同的值。 在鸟瞰图中显示光半径:为光源配置的半径在鸟瞰图中以彩色显示为凸起的圆圈。
在鸟瞰图中显示光半径:为光源配置的半径在鸟瞰图中以彩色显示为凸起的圆圈。
鸟的眼睛 看法
这  鸟的眼睛 视图在 3D 视图中提供当前场景的概览。相机显示为灰色圆柱形物体,光源显示为黄色圆锥形物体。
鸟的眼睛 视图在 3D 视图中提供当前场景的概览。相机显示为灰色圆柱形物体,光源显示为黄色圆锥形物体。
为此,另见下文: 3D 视图、鸟瞰图和照明配置示例.
与在 3D 视图中一样,您可以移动鼠标来更改整个场景的视角。但是,摄像机位置始终保持在场景的 Z 轴上。缩放只会改变相机到中心的距离。
当您选择 在鸟瞰图中显示光半径 中的选项 灯光 对于光源视图,点亮区域显示为黄色圆圈。
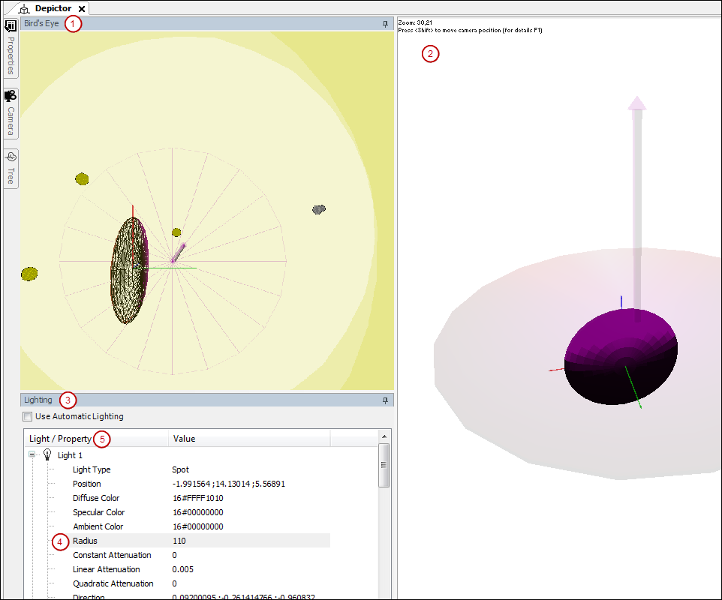
3D 视图、鸟瞰图和照明配置示例
有关鸟瞰图 (1) 和 3D 视图 (2) 中的姿势,请参见下图中的示例。通过配置照明视图(3),场景还获得了三个光源(5),在鸟瞰图中可以看作是黄色物体。在鸟瞰图中,光源的半径 (4) 显示为围绕对象的黄色重叠圆圈。相机在鸟瞰图中显示为灰色锥形物体。 3D视图中带有箭头轴的阴影圆形区域也在鸟瞰图中,并且对象也被绘制为框架模型。这有助于在两个视图中检测相机在对象上的当前观察方向。