6軸多関節ロボット
6つの回転軸と6つの自由度(DoF)を備えた関節式アームロボットの変換。ロボットアームの3つの方向軸は、ジョイントの中心という1点で交差します。
NS SMC_Trafo_ArticulatedRobot_6DOF と SMC_TrafoF_ArticulatedRobot_6DOF 機能ブロックは、6つの回転軸を持つ関節式アームロボットの順方向および逆方向の変換を実装します。この画像では、デカルト座標系が軸0で下にマークされています。z軸は下向きで、x軸はツールの中心点(TCP)の方向に前向きです。デカルト座標系の原点は、交点軸0とロボットの下側です。
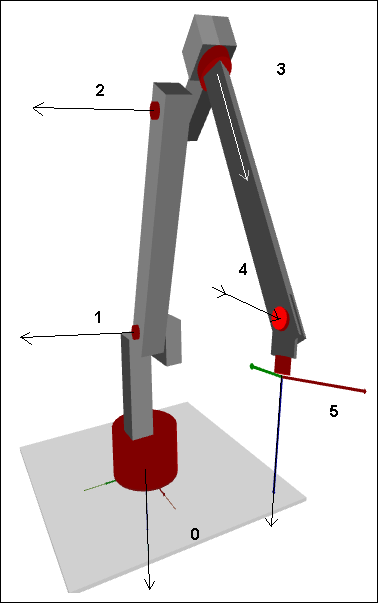
軸の定義
回転軸は黒い矢印で識別されます。正の回転方向は右手の法則によって与えられます。たとえば、軸0を正の方向に回転させると、ロボットは上から見て時計回りに回転します。
軸0、1、3、および4:]-180°、180°[
軸2:[-90°、180°]
軸5:無制限。範囲は360°より大きくなる場合があります。
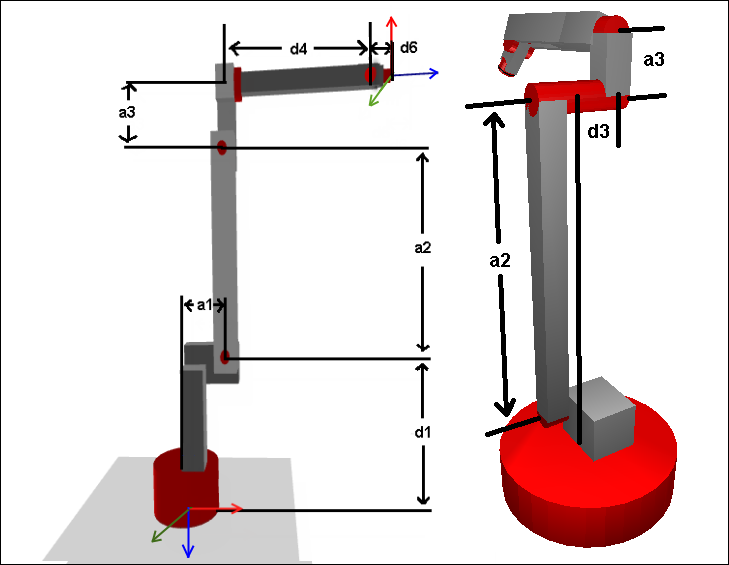
ホーミング位置と寸法
左の画像は、キネマティクスの原点復帰位置を示しています。これは、すべての軸がゼロ位置にある位置です。構成構造で指定された寸法を指定します SMC_TrafoConfig_ArticulatedRobot_6DOF。パラメータの名前と記号は、Denavit-Hartenbergの規則に従っています。右の画像は、追加のDenavit–Hartenbergパラメーターを示しています d3。
a1、a3、d4、およびd6は> = 0である必要があります
a2は> 0でなければなりません(>
g_fSMC_CNC_EPS)d1は<= 0でなければなりません
ジョイントオフセット(sigma_i) | レバーオフセット(d_i) | レバーの長さ(a_i) | レバー回転(alpha_i) | |
|---|---|---|---|---|
1 | 0° | d1 | a_1 | -90° |
2 | 90° | 0 | a_2 | 0° |
3 | 0° | d3 | a_3 | 90° |
4 | 0° | d4 | 0 | 90° |
5 | 0° | 0 | 0 | -90° |
6 | 0° | d6 | 0 | 0° |
プログラミング
ツールセンターの位置は、X、Y、およびZで制御されます。X、Y、およびZの単位は、パラメータに使用されるものと同じです。 a_i と d_i (例:mm)。方向は、A(ヨー)、B(ピッチ)、およびC(ロール)で度単位で制御されます。
変換オブジェクト
データ構造 SMC_TrafoConfig_ArticulatedRobot_6DOF そしてその SMC_Trafo_ArticulatedRobot_6DOF と SMC_TrafoF_ArticulatedRobot_6DOF 機能ブロックはにリンクされています SM3_CNC。