4軸パレタイザーキネマティクス
4軸パレタイザーキネマティクスは、パレタイズ作業に頻繁に使用される一般的なロボットタイプです。キネマティクスには、4つの制御された回転軸(赤でマーク)と5番目の機械的な回転軸(灰色でマーク)が備わっています。 The SMC_Trafo_4AxisPalletizer と SMC_TrafoF_4AxisPalletizer POUは、順変換と逆変換を実装します。
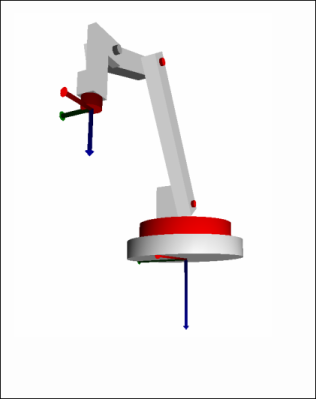
デカルト座標系は、パレタイザーの基礎です。 Z軸は垂直に下向きになり、X軸は「前方」になります。これは、アームが軸のゼロ方向を指す方向を意味します。デカルト座標系の原点は、関節軸1とロボットの下側の交点です。
軸の定義
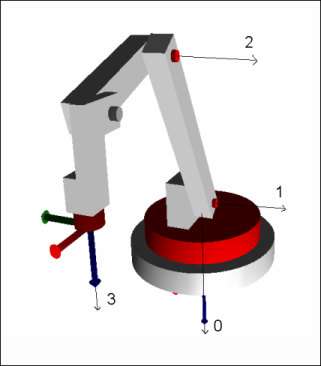
次の画像は、4つの軸の回転方向を示しています。黒い矢印は関節軸に沿って走っています。回転方向は右手の法則に従って決定されます。右手の親指が矢印に沿って下を向いている場合、正の回転方向はわずかに湾曲した指の方向になります。たとえば、上から見た場合、軸0の正の回転方向は時計回りですが、軸1と2は正の回転のために「前方」に傾斜しています。
キネマティクスには、4つの制御された回転軸(赤色の軸a0、a1、a2、a3を参照)と5番目の機械式回転軸(灰色の軸Mを参照)があります。
軸0:]-180°、180°[
軸1:[-90°、90°]
軸2:[-180°、90 [
M軸:機械式回転軸制限なし
軸3:無制限。範囲は360°より大きくすることもできます
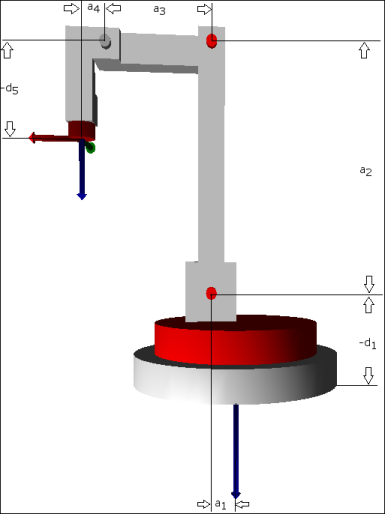
ゼロ位置と寸法
この画像は、すべての軸のゼロ位置での運動学を示しています。ゼロ位置では、工具座標系の軸は機械座標系の軸と平行になります。構成構造で指定された寸法を指定します SMC_TrafoConfig_4AxisPalletizer また、すべてを指定します a_i 正の兆候とすべて d_i 負の符号付き。パラメータの名前は、Denavit-Hartenbergの規則に従っています。
ジョイントオフセット(sigma_i) | 関節距離(d_i) | アーム要素の長さ(a_i) | ねじれ(alpha_i) | |
|---|---|---|---|---|
1 | 0° | d_1 | a_1 | 90° |
2 | -90° | 0 | a_2 | 0° |
3 | 90° | 0 | a_3 | 0° |
4 | 0° | 0 | a_4 | 90° |
5 | 0° | d_5 | 0 | 180° |
Gコードでのプログラミング
グリッパーの位置はX、Y、およびZで制御されます。垂直方向のグリッパーの回転は、追加の軸Cによって制御されます。角度は度で指定されます。
オブジェクト
データ構造 SMC_TrafoConfig_4AxisPalletizer および機能ブロック SMC_Trafo_4AxisPalletizer と SMC_TrafoF_4AxisPalletizer ライブラリにリンクされています SM3_Transformation。パラメータの説明については、ライブラリマネージャでこれらのオブジェクトを検索してください。