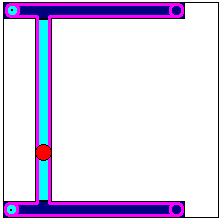
固定軸を備えたHガントリー
キネマティック構成はガントリーシステムに似ていますが、軸(ドライブ)がしっかりと取り付けられています。彼らはベルトによってツールホルダーを動かします。
による変換 SMC_TRAFO_GantryH2 と SMC_TRAFOF_GantryH2 POUには、次の軸構成が必要です。 xとyを交換することにより、他の構成を実行できます。
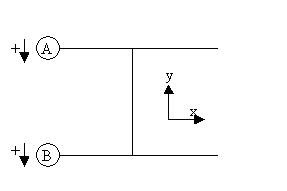
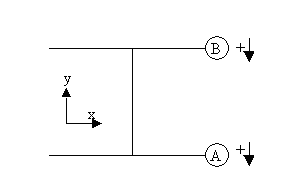
この変換には、特別なホーミングが必要です。両方の軸を同じ速度で移動する必要があります。移動をX方向にする必要がある場合は、ドライブAとBを移動する必要がありますが、厳密にX移動するには、逆速度で移動する必要があります。 X移動の場合のみ、反対の速度で移動する必要があります。ホーミングが見つかった場合、フォワードトランスフォーメーションPOUから計算されたX値とY値がオフセットとして使用されます(dOffsetX と dOffsetY)。