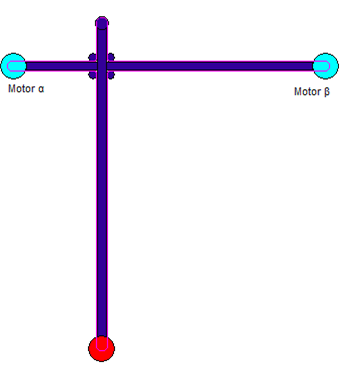
固定軸を備えたTガントリー
このキネマティックシステムは、Hガントリーシステムに似ています。ここのドライブも固定されて取り付けられており、ツールホルダーはベルトによって動かされます。
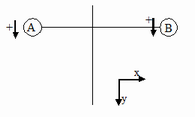
によって実行される変換 SMC_TRAFO_GantryT2 と SMC_TRAFOF_GantryT2 POUは、次のドライブコンステレーション用に設計されています。
この変換には特別なホーミングが必要であることに注意してください。
X方向に移動する場合は、AドライブとBドライブを同じ速度で移動する必要があります。厳密にY移動を実行する場合、ドライブは反対方向に回転する必要があります。ドライブが原点復帰位置を検出すると、順方向変換POUから計算されたX値とY値がオフセットとして使用されます(dOffsetX と dOffsetY)。
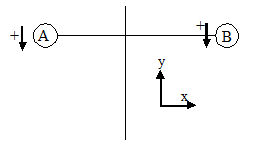
The SMC_TRAFO_GantryT2_O と SMC_TRAFOF_GantryT2_O 関数ブロックは、次のコンスタレーションを使用して同じ計算を実行します。