パラレルキネマティクス
直線軸の三脚
このシステムには、互いに定義された角度にある3つのリニアドライブがあります。ドライブは、トラバーススライドを備えた3本のレールで構成されています。ツールプレートは、同じ長さのコネクティングロッドによってトラバーススライドに接続されます。コネクティングロッドのペアのセットは、同じ方向で床に平行にツールプレートを保持します。キネマティクスは、ツールプレートを3次元で動かすことができます。
これらの運動学の順方向および逆方向の変換は、 SMC_Trafo_Tripod_Lin と SMC_TrafoF_Tripod_Lin POU。三脚の軸角度は、レールと垂直軸の間の角度によって定義されます(dAxisAngle)。
機械的要件と座標系
3軸の長さは同じです。
コネクティングロッドの長さは同じです。
コネクティングロッドのペア間の距離は、すべてのペアで同じです。
ドライブレールと垂直軸の間の軸角度は、3つのドライブすべてで同じです。許容角度は0°から90°の間です。
軸は、スライダーのコネクティングロッドジョイント間のポイントの動きを定義します。
XYZ座標系は右手です。 XベクトルとYベクトルは水平で、Zは上を向いています。原点は、3つの移動軸とXY平面(下の図:点A)の交点が[0,0,0]の位置の円上にあるように定義されます。
名前 | 説明 |
|---|---|
| ツールプレートの中心からコネクティングロッドのグリップポイントまでの距離 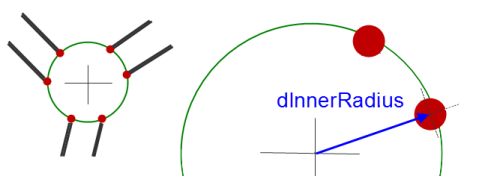 |
| 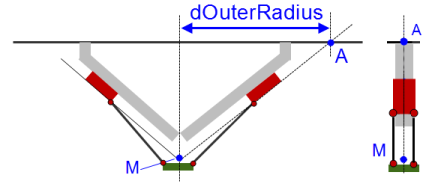 点Aは、軸とXY平面の交点です。 |
| コネクティングロッドの長さ |
| 1対の2つのコネクティングロッド間の距離 |
| 最初の軸の点Aは、デフォルトでX軸を定義します。オフセットは、構造全体をZ軸を中心に回転させるために使用されます。この場合、ポイントAはX軸上にありません。 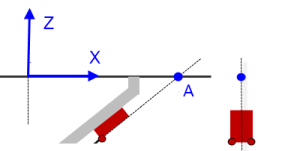 |
| オフセットは、軸の位置値をデフォルト設定のゼロに設定するために使用されます。 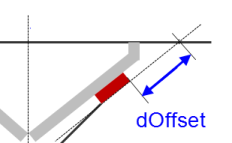 |
| |
| |
ライブラリの説明には、他のパラメータに関する情報があります。 | |
垂直軸を備えた三脚
このシステムは、上記の運動学的設計の特殊な変形であり、同じ機械的要件があります。角度 dAxisAngle ガイドレールと垂直軸の間は0°で、ガイドレールは垂直軸に平行です。
これらの運動学の順方向および逆方向の変換は、 SMC_Trafo_Tripod_Lin と SMC_TrafoF_Tripod_Lin ファンクションブロック。三脚の軸角度は、レールと垂直軸の間の角度によって定義されます(dAxisAngle)。
名前 | 説明 |
|---|---|
| このパラメータは、ツールプレートへのコネクティングロッドの6つのグリップポイントによって表される円の半径を定義します。 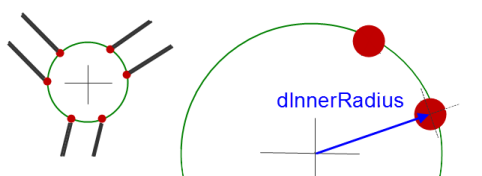 |
|  |
| コネクティングロッドの長さ |
| コネクティングロッドのペア同士の距離 |
| 最初の軸の点Aは、デフォルトでX軸を定義します。オフセットは、構造全体をZ軸を中心に回転させるために使用されます。この場合、ポイントAはX軸上にありません。 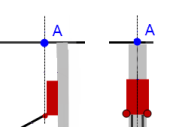 |
| オフセットは、軸の位置値をデフォルト設定のゼロに設定するために使用されます。 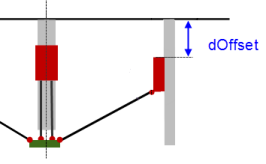 |
| |
| |
ライブラリの説明には、他のパラメータに関する情報があります。 | |
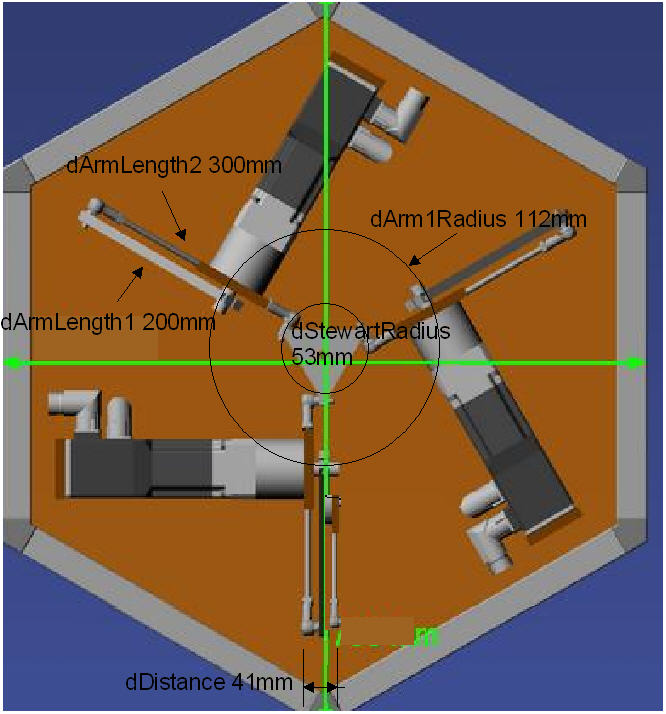
回転軸付き三脚
三脚の場合、キネマティクスは、アームとコネクティングロッドによってツールプレートに接続されている3つのロータリードライブによって実装されます。
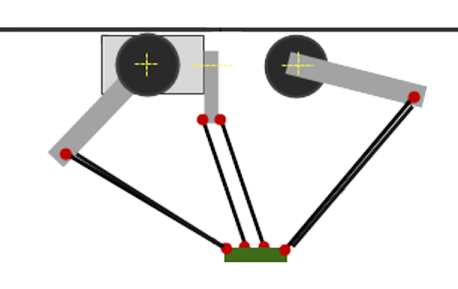
座標系の原点は、3つのアームすべてが水平位置にあるときのツールプレートの中心の位置です。
これらの運動学の順方向および逆方向の変換は、 SMC_TRAFO_Tripod_Arm と SMC_TRAFOF_Tripod_Arm ファンクションブロック。
機械的要件と座標系
3つの軸の長さは同じです。
コネクティングロッドの長さは同じです。
コネクティングロッドのペア間の距離は、すべてのペアで同じです。
名前 | 説明 |
|---|---|
|  |
| |
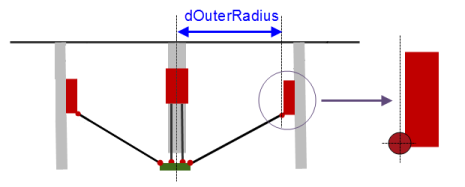
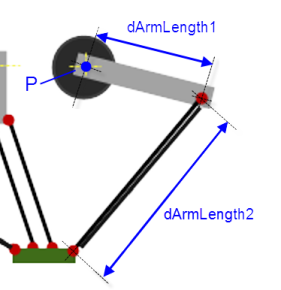
| パラメータは、ドライブの3点Pによって確立される円の半径を定義します。 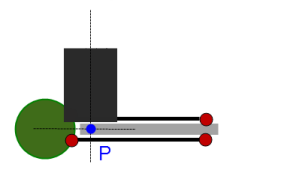 |
| このパラメータは、ツールプレートへのコネクティングロッドの6つのグリップポイントによって表される円の半径を定義します。 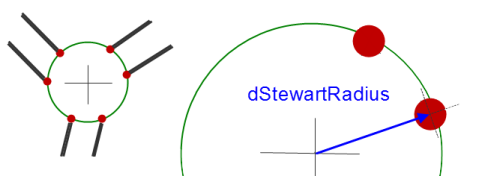 |
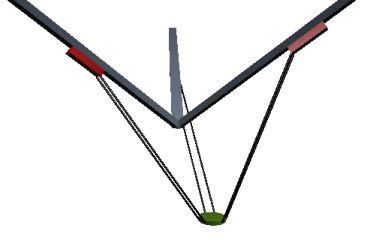
| 1対の2つのコネクティングロッド間の距離 |
| |
| |
| |
ライブラリの説明には、他のパラメータに関する情報があります。 | |
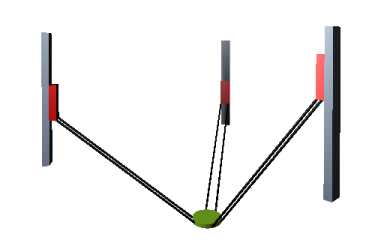
この画像は、すべての軸のゼロ位置を示しています。 (3つの上部アームは水平です。)MCSはツールプレートに表示されます。 A0、A1、およびA2軸の矢印は、右手の法則に従ったドライブの回転方向を示しています。
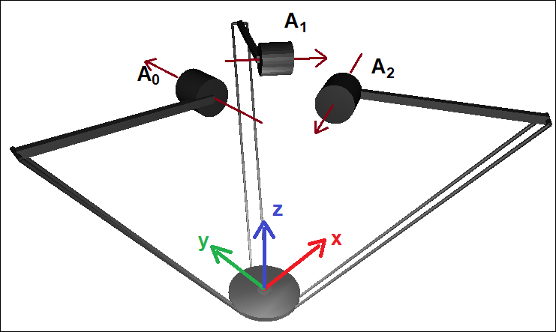
機械座標系(MCS) | |
元 | 3つの上部アーム(A0、A1、またはA2に直接接続されているもの)がすべて水平位置にあるときに、ツールプレートの中点で定義されます |
X | 原点から、最初のモーター(A0)から離れた方向を指し、最初のアームの上腕セグメントに平行です。 |
Y | MCSが右手になるようにXとZによって決定されます |
Z | ツールプレートに直交 ツールプレートからモーターの方向へのポイント |
それぞれの変換は、次のPOUによって実行されます SMC_TRAFO_Tripod_Arm と SMC_TRAFOF_Tripod_Arm:
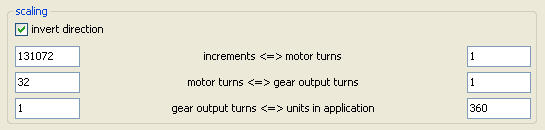
変換設定
tta: SMC_TRAFO_Tripod_Arm := (dArmLength1:=200, dArmLength2:=300, dArm1Radius:=112, dStewartRadius:=53,dDistance:=41,dMaxAngleBallJoint:=60); ttaf: SMC_TRAFOF_Tripod_Arm := (dArmLength1:=200, dArmLength2:=300, dArm1Radius:=112, dStewartRadius:=53,dDistance:=41);