軸グループの状態
下の画像は、軸グループの可能な状態と状態間の遷移を示しています。
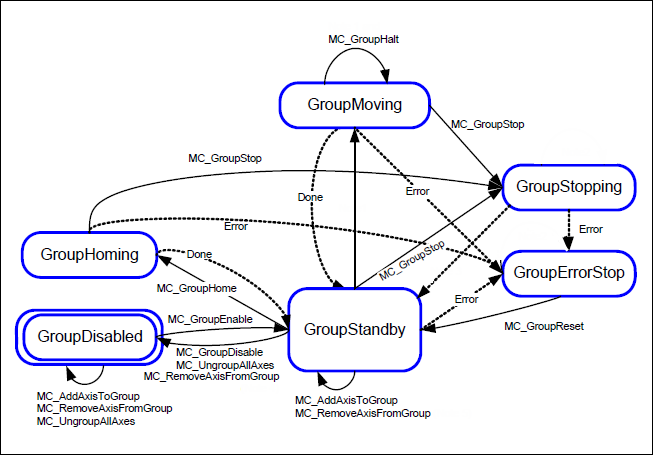
個々の軸の誤差は常に軸グループを
GroupErrorStop州。軸グループが
GroupMoving、その後すべての軸がSynchronizedMotion。軸グループが
GroupMovingにGroupStandby、その後すべての軸がstandstill。軸グループが
GroupMovingにGroupErrorStop、その後すべての軸がGroupErrorStop。軸グループが
GroupStandby、その場合、個々の軸は必ずしもすべてではありませんstandstillこれらは、次のような単軸モーション機能ブロックによって制御できるためです。MC_Jog。動作がエラーで終了した場合、バッファリングされた後続の動作はすべて中止され、
CommandAborted。軸グループが動的座標系に従う限り、それは
GroupMoving。軸グループは
GroupMovingグループが調整された方法で移動された場合(パート4のモーションブロックの1つによって)。からの切り替えGroupMovingにGroupStandby最後の位置変更から1サイクル後に行われます。