結合ドライブユニット
結合されたドライブは、フィールドバストポロジ内のドライブを表すデバイスに属します。これらのドライブのシンボルには、対応するフィールドバスタイプを示す小さなマークが付いています。たとえば、すべての標準サーボドライブはフィールドバスによってコントローラに接続されています。
ドライブを使用する場合、 CODESYS SoftMotion フィールドバスマスターの特定のデバイスの説明を提供します(「_SoftMotion」サフィックス)。これらは、ドライブの基本的なパラメータを最適化しています。
重要
使用されるドライブの場合 CODESYS SoftMotionドライブ内でモジュロ処理を無効にする必要があります。モジュロ処理は次のように実行されます。 CODESYS SoftMotion コントローラで。可能であれば、最大移動範囲は 32 ビットに設定する必要があります。
結合ドライブデバイスの追加(EtherCAT)
要件: SoftMotion 互換コントローラーがプロジェクトに挿入されている。
を選択 SoftMotion デバイスツリーのコントローラー。
コンテキストメニューで、をクリックします 。
の中に デバイスを追加 ダイアログで、 端末。
クリック デバイスを追加 ボタン。
デバイスがデバイスツリーに追加されます。 The デバイスを追加 ダイアログは開いたままです。
デバイスツリーに追加したデバイスを選択します。
の中に デバイスを追加 ダイアログで、SoftMotionスレーブを選択します()。
クリック デバイスを追加 ボタン。
デバイスがデバイスツリーに追加されます。
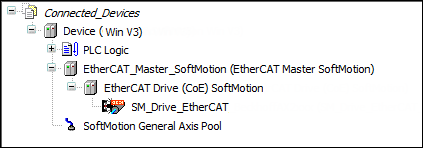
デバイスをダブルクリックすると、対応するデバイスエディタが開きます。