Pick&Placeを使用したロボットのプログラミング
を参照してください Robotics_PickAndPlace.project と Robotics_PickAndPlace_without_Depictor.project のインストールディレクトリにあるサンプルプロジェクト CODESYS 下 ..\CODESYS SoftMotion\Examples。
The Robotics_PickAndPlace.project プロジェクトには CODESYS Depictor インストールするDepictorパッケージ。このプロジェクトは、運動学を3Dアニメーションで表示します。プロジェクト Robotics_PickAndPlace_without_Depictor.project は、視覚化画面にシーケンスの簡略化された形式を示しています。
この章では、に関連するオブジェクトのみを取り上げます。 SoftMotion。
この例は、三脚、回転台、およびコンベヤーで構成されています。 キネマティクスは、回転台にあるリングをピックアップします。ピックアップすると、キネマティクスのツールプレートが回転台と同期して移動します。 次に、リングはコンベヤーベルト上にあるコーンに配置されます。配置するとき、キネマティクスはコンベヤーベルトと同期して動きます。 シーケンスを制御するための2つのボタンが視覚化画面にあります。を押すと 自動 ボタンを押すと、リングが自動的に設定されます。それ以外の場合は、 演奏する リングを配置するためのボタンが表示されます。 | 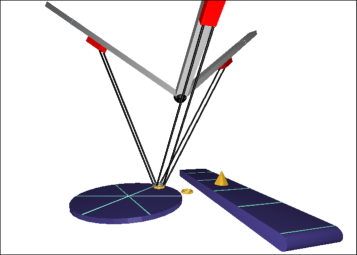 |
ストラクチャ プロジェクトの
CODESYS SoftMotion コントローラ
軸グループ 三脚:軸グループは、運動学と個々の軸へのマッピングを定義します Tripod1、 Tripod2、 と Tripod3。
DepictorCalculations(PRG)、 環境(PRG)、 リング(FB):完全なシーケンスと視覚化を制御するためのプログラム。これらのPOUは、製品座標系(PCS_1およびPCS_2)の定義を除いて、PLCopenブロックの理解には関係ありません。
ロボット(PRG):モーションシーケンスを制御するためのプログラム。詳細な説明は次の段落にあります。
視覚化:シーケンスを明確にするためのアニメーションによる視覚化。
Tripod1、 Tripod2、 Tripode3:三脚の直線軸。
DriveRotaryTable:回転台の軸。
DriveConveyorBelt:コンベヤーベルトの軸。
ロボット(PRG)シーケンシャルプログラムの構造
NS Robot (PRG) プログラムはサイクルで実行されます。このとき、個々のステップは、 state。プログラムの終了時に、使用されているすべての機能ブロックの呼び出しは、モーションコマンドの準備ができています。
三脚の単軸が作動します(機能ブロック
pwA1、pwA2、 とpwA3タイプのMC_Power)。CASE 0:参加軸が動作するのを待ちます。CASE 10:原点復帰位置を設定します。物理的なアプリケーションでは、ホーミングはこの位置で実行されます(機能ブロックspA1、spA2、 とspA3タイプのMC_SetPosition)。CASE 20:ワールド座標系での機械座標系の配置(機能ブロックsetCoordタイプのMC_SetCoordinateTransform)。CASE 30:軸グループの解除(機能ブロック)enableタイプのMC_GroupEnable。軸グループがすべての値を適用したという応答を待ちます。
CASE 40にCASE 130:Pick&Placeアプリケーション:すべての動きは、おそらく複数のインスタンスで命令されますMC_MoveDirectAbsolute、MC_MoveDirectRelative、 とMC_MoveLinearサイクルで呼び出されます。の立ち上がりエッジExecute各ステータスでこれらのPOUを入力すると、新しいモーションコマンドが発行されます。bCommandAcceptedプロセスの成功を示します。コマンドの典型的なチェーンは、次のモーションコマンドの前にこの出力を問い合わせることから生じます。
MC_TrackConveyorBelt と MC_TrackRotaryTable ファンクションブロック
The MC_TrackRotaryTable で呼び出される機能ブロック Ring 機能ブロックは、を決定するために使用されます PCS_1 部分座標系。この座標系は、回転台にリングを置いたときに設定されます。
回転台座標系の原点 RotaryTableOrigin 回転台の中点です。 Z軸は回転台の回転軸です。 PCS_1は、入力変数の関数として回転台座標系のZ軸を中心に回転します。 RotaryTable。軸グループはPCS_1で移動するため、テーブルの回転に従います。
動作はに似ています MC_TrackConveyorBelt で呼び出される機能ブロック Cone ファンクションブロック。この場合、PCS(PCS_2)座標系のX軸に従います ConveyorBeltOrigin。