運動の中断と継続
の Robotics_Interrupt_Continue.project ここで説明するサンプルプロジェクトは、 CODESYS 下 ..\CODESYS SoftMotion\Examples。
この例では、コマンドされた動作が SMC_GroupInterrupt ファンクションブロックを実行し、後で再開します SMC_GroupContinue ファンクションブロック。軸グループは中断と継続の間の任意の動作を実行できます。
アプリケーションの構造
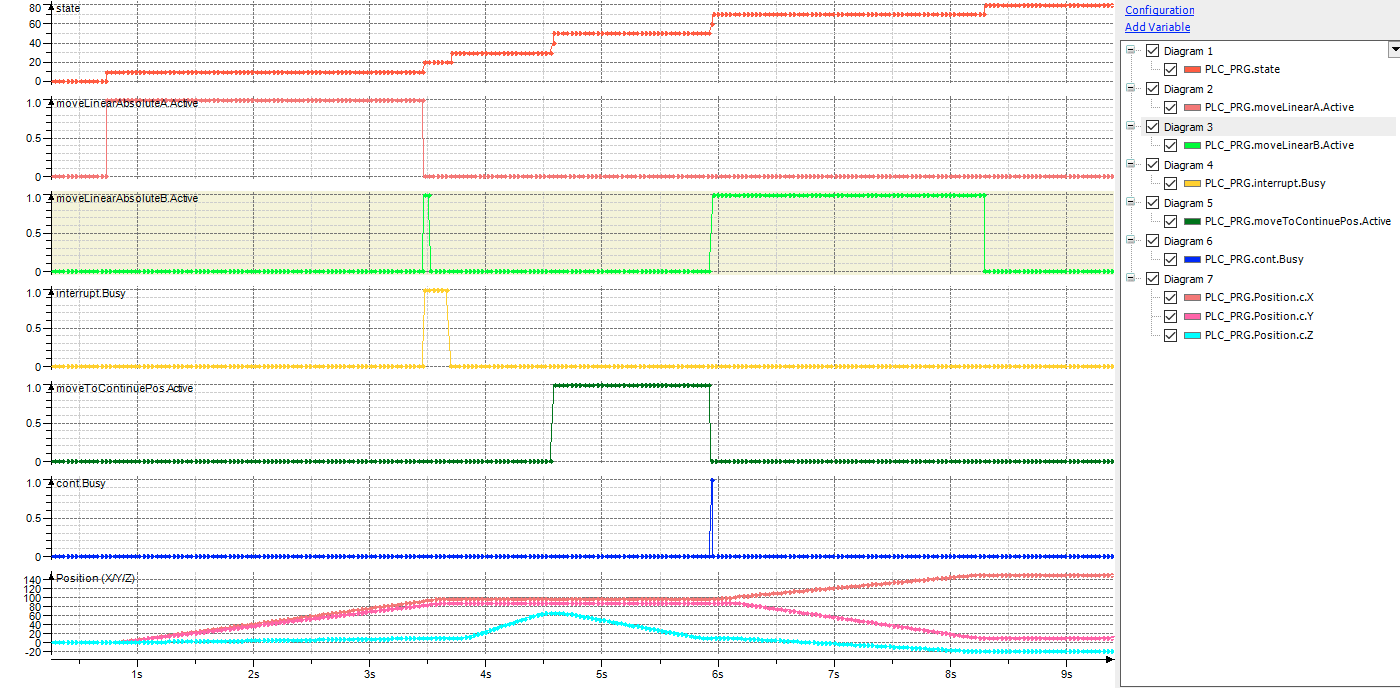
アプリケーションは、 PLC_PRG プログラムとトレースにより、状態遷移を簡単に追跡できます。
まず、軸と軸グループが有効になります。(
STATE_POWER_ON)そして、2つの動き、
moveLinearAそしてmoveLinearB、ブレンディングで命令されます。(STATE_START_MOVING)2 番目の動作がアクティブになるとすぐに (ブレンディングが開始されると)、動作は中断されます。原因としては、たとえば、ツールの欠陥が検出されたことが考えられます。
(STATE_INTERRUPT)たとえば、欠陥の後でツールを交換するために、正の Z 方向に相対的な PTP 移動が実行されます。
(STATE_INTERMEDIATE_MOVEMENT)再開する前に、システムは元の動きが中断された位置に戻ります。
STATE_GET_CONTINUE_POS/STATE_MOVE_TO_CONTINUE_POS)本来の動きが再開されます。
(STATE_CONTINUE)
使用法
作成したプログラムをコンパイルしてログインします。さまざまな状態を追跡するには、トレースをコントローラーにダウンロードします。アプリケーションを起動します。