タブ:一般
軸タイプ | |
仮想モード |
注:IECコードを使用して、ドライブの仮想モードを設定およびリセットすることもできます。 |
モジュロ |
モジュロ値[u]:1サイクルの値(モジュロ周期) 値はに保存されます 注:を選択した場合 モジュロ ドライブタイプ、次に製品 |
有限の |
ソフトウェアリミットスイッチ 有効化
|
モータータイプ | |
ロータリー |
|
線形 |
|
速度ランプタイプ モーションを生成する単軸モジュールとマスター/スレーブモジュールの速度プロファイルを定義します。 注:ランプの種類 Sin² と 二次 (スムーズ) ロボット工学ではサポートされていません。 | |
台形 |
|
Sin² |
|
二次方程式 |
|
二次 (スムーズ) |
|
身分証明書 | |
ID | 整数識別子。ドライブごとに一意である必要があります。たとえば、この識別子は PLC ログでエラーが発生したときにドライブを識別するために使用されます。 |
デッドタイム | |
サイクル | 間のサイクル単位のデッドタイム |
ダイナミックリミット PLCOpen Part 4 POUの制限値が考慮されています。さらに、次のような名前のライブラリPOUでも使用されます | |
速度 [u/秒] | 速度、加速、減速、およびジャークの制限値 |
アクセラレーション [u/s²] | |
減速 [u/s²] | |
ジャーク [u/s³] | |


ソフトウェア制限 | |
アクティベート |
|
ソフトウェアエラーリアクション . ソフトウェアエラーの原因
ソフトウェアエラー対応については、 減速、 マックス。、ダイナミックリミットの減速も考慮されます。最大距離から減速も計算されます。これらの減速値のうち大きい方がエラーランプに使用されます | |
減速 [u/s²]: | エラーランプの減速 |
最大距離 [u] | オプション エラーが発生した後、ドライブはこの距離内で停止状態になっている必要があります。 |
ポジションラグモニタリング 検出されたラグに対するシステム応答。 設定位置と補正された実際の位置との差がラグ制限を超えると、ラグが検出されます。外挿された実際のポジションは次の式で計算されます
この値は、デッドタイムによって補正された軸の実際の位置です。 注:ラグを監視している場合は、デッドタイムを確認して入力する必要があります。説明については、次の章を参照してください 実績値、設定値、デッドタイム. 注:ラグモニタリングは仮想ドライブでは使用できません。 | |
非アクティブ化 | 応答なし ラグモニタリングは無効になっています。 |
ドライブを無効にする | ザ・ |
クイックストップを行う | ザ・ |
有効状態を維持 | ドライブの電源はオンのままですが、実行中の動作はすべて突然停止します。 |
ラグリミット: | コントローラーのラグモニタリング ドライブで独立した監視を行うこともできますが、このダイアログでは設定されていません。 |
詳細については、次を参照してください。 システムのデッドタイムの決定
次の画像は、さまざまなランプタイプの効果を示しています。位置は緑、速度は青、加速度は赤で描かれています。
台形 速度は部分的に線形で連続的ですが、部分的に一定の加速度はジャンプを示します。 | 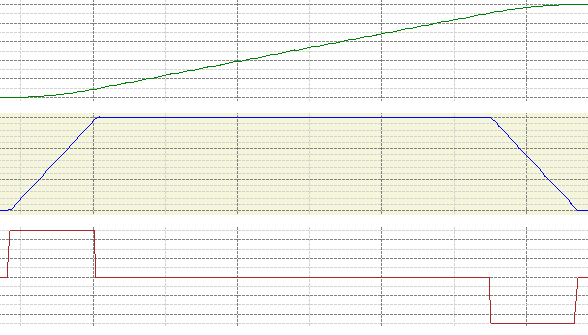 |
Sin² 速度プロファイルの切れ目は、加速のジャンプを減らすために(線の代わりにsin²関数を使用して)滑らかになります。 ユーザーは、このランプタイプのジャークを制限することはできません。設定された最大ジャークは、移動の開始時に加速度がゼロに等しくなく、中断された減速および加速ランプをシームレスに継続できない場合にのみ効果があります。次に、ジャーク制限を考慮して、現在の移動が開始される前に加速度がゼロに減少します。台形速度プロファイルと比較して、この場合、減速にはより多くの時間がかかります。 | 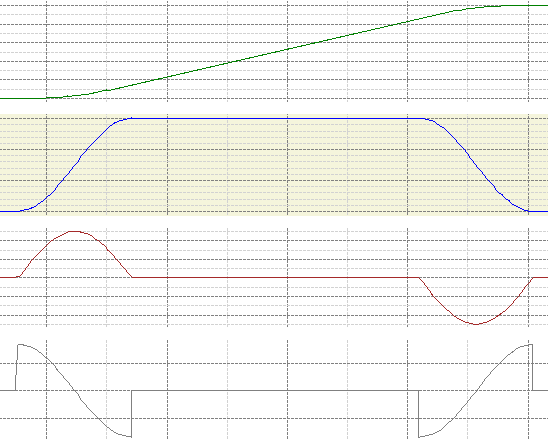 |
二次 加速は部分的に線形で連続的であり、ジャークにはジャンプがあります。速度は、2次セグメントと線形セグメントで構成されます。 | 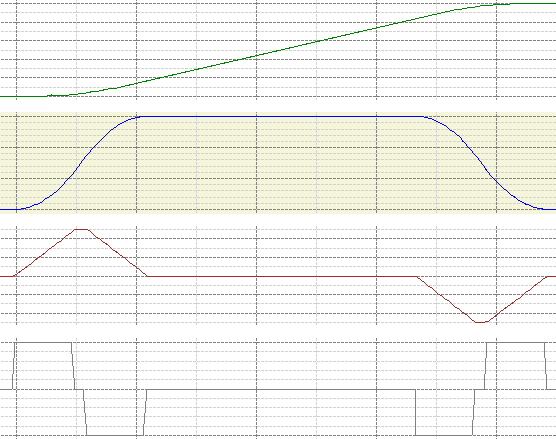 |
二次(スムーズ) 二次ランプタイプの線形加速ランプは、最初と最後の勾配値がゼロの「滑らかな」関数に置き換えられます。その結果、ジャークも継続します。 注:動きが中断されると、ジャークが中断する可能性があります。 | 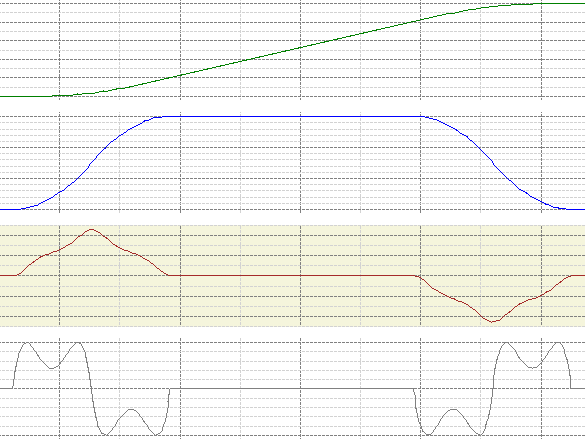 |
詳細については、以下を参照してください。 動きの中断