座標系
CODESYS SoftMotion Robotics には、動きを制御できるさまざまな座標系が用意されています。
座標軸システム (ACS)
ツール座標系 (TCS)
ワールド座標系 (WCS)
マシン座標系 (MCS)
プロダクト座標系 (PCS_1、PCS_2)
座標系 | [説明] |
|---|---|
座標軸システム (ACS) | 軸座標系は、ロボットの各軸が 1 次元にまたがる軸空間の座標系を定義します。その結果、ロボットの各軸の位置を指定できます |
ツール座標系 (TCS) | ツール座標系は、キネマティクスのツール中心点 (TCP) 上にあるデカルト座標系です。その位置と向きはロボットの位置によって異なります。 |
ワールド座標系 (WCS) | ワールド座標系は静的なデカルト座標系で、以降のすべての座標系の基礎となります。これらはワールド座標系を基準にして定義されます |
マシン座標系 (MCS) | マシン座標系は静的なデカルト座標系です。物理ロボットに対するMCSの位置と向きは、キネマティクスによって定義されます ザル MC_Set 座標トランスフォーム ファンクションブロックを使用して、ワールド座標系 (WCS) を基準にして座標系をシフトできます。 |
プロダクト座標系 (PCS_1、PCS_2) | 製品座標系は、ユーザーが定義できるデカルト座標系です。これらはワールド座標系 (WCS) を基準にして表され、静的でも動的でもかまいません . 静的
. ダイナミック 次のファンクションブロックを使用して動的座標系を定義できます。 |
座標系の初期位置と方向
ロボットの運動学によって、座標系の初期位置と向きが決まります。これはキネマティクスのドキュメンテーションに記載されています
物理ロボットに対するマシン座標系 (MCS) の位置と方向
MCS、ひいては工具座標系 (TCS) に対する工具中心点 (TCS) の位置と方向
ロボットのゼロ位置、および個々の軸の回転または移動方向
ワールド座標系 (WCS) とプロダクト座標系 (PCS_1、PCS_2) は最初はシフトされず、マシン座標系と同じです。
複数のロボットとワークピース
座標系の位置と方向は、ロボットごとに定義されます。複数のロボットが連携して作業する場合、ワールド座標系 (WCS) を共通の基本座標系として定義すると便利です。この座標系に基づいて、個々のロボットのマシン座標系 (MCS) と製品座標系 (PCS_1、PCS_2)
例
回転関節が 2 つあるロボットの使用例 (a0 そして a1)
キネマティクス
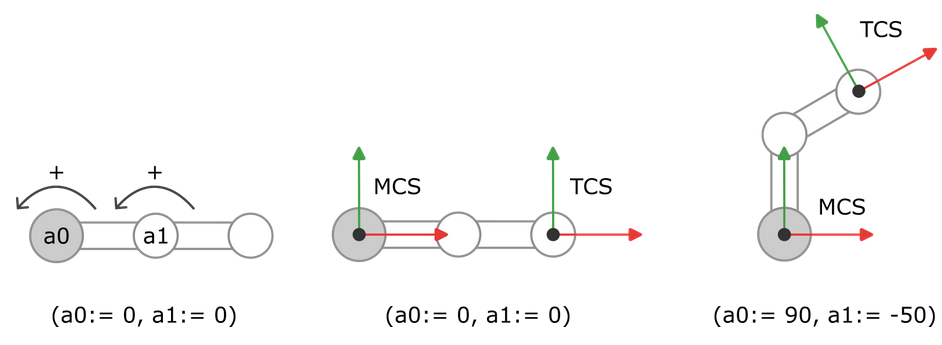
キネマティクスはロボットのゼロ位置を定義します (下図参照)。マシン座標系の原点は軸の回転軸上にあります a0。X 軸は、1 番目の軸の位置が 1 番目のリンクの方向を指します a0 は 0。Y 軸は、1 番目の軸の位置が 1 番目のリンクの方向を指すようになります a0 は +90°。反時計回りの回転は正の回転方向に対応します。ツールセンターポイント (TCP) はロボットの 2 番目のリンク (下図) の端にあり、TCS の原点を形成します。TCS は X 軸が 2 番目のリンクに沿って走るように位置合わせされています
座標軸システム (ACS)
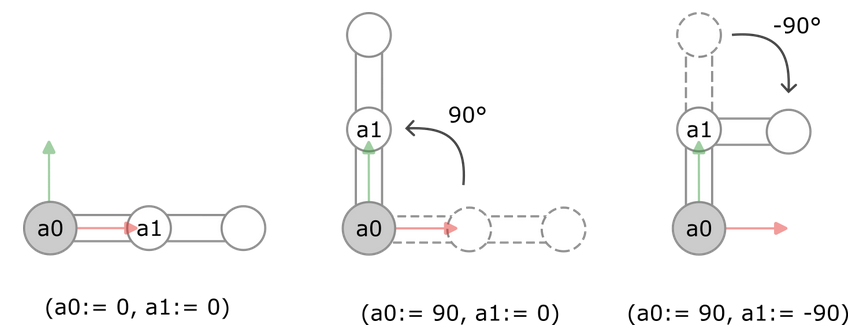
キネマティクスは、ロボットのゼロ位置と個々の軸の回転方向を指定しています。ロボットは 2 つの軸で構成されているからです。 a0 そして a1、軸の位置を指定できます a0 そして a1 ACSで。
最初の画像では、位置を指定します(a0:= 0, a1:= 0)。これはロボットのゼロ位置に相当します。
2番目の画像では、位置を指定します(a0:= 90, a1:= 0)。1 番目の軸であるゼロ位置から開始します a0 回転している 90° 正の回転方向に。2 番目の軸 a1 ゼロ位置のままです。
3番目の画像では、位置を指定します(a0:= 90, a1:= -90)。1 番目の軸であるゼロ位置から開始します a0 回転している 90° 正の回転方向に (2 番目の画像のように)。さらに、2 番目の軸は a1 回転している 90° 負の回転方向に。
ツール座標系 (TCS)
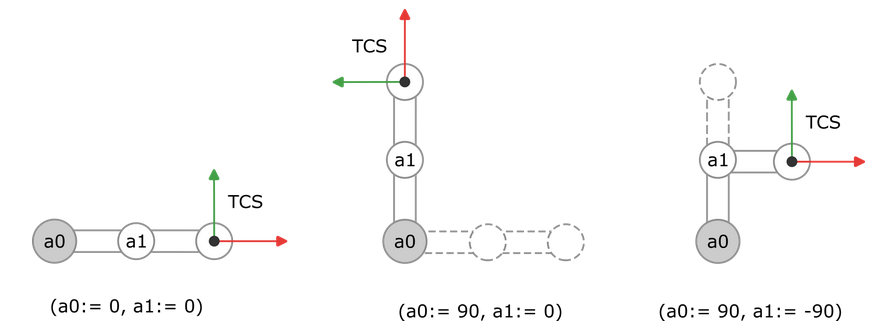
キネマティクスは TCP と TCS の位置と方向を定義します。ロボットをどのように動かすかによって、TCS の位置と向きも変わります。
ワールド座標系 (WCS)、マシン座標系 (MCS)、およびプロダクト座標系 (PCS_1、PCS_2)
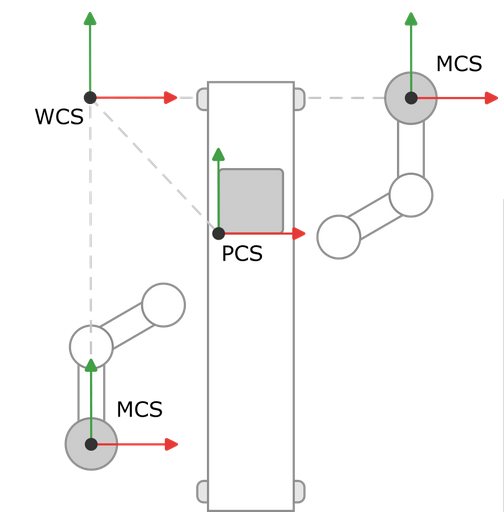
生産ホールでは、コンベヤーベルトの左右に2台のロボットが立っています。ロボットはコンベアベルト上で製品を処理する必要があります。共通のワールド座標系を定義し、それを生産ホールの左上隅に配置します。この座標系から始めて、マシン座標系とプロダクトまでの距離と回転を決定し、それに応じて座標系をシフトします
この例では、すべての座標系が同じ方法で整列されているため、座標系をシフトするだけで済みます。左側のロボットのマシン座標系は Y 方向に、右側のロボットのマシン座標系は X 方向に、プロダクト座標系は X 方向と Y 方向の両方にシフトします