SF_MutingPar
ヒント
ここで説明する機能ブロックのバージョンは、 機能ブロックのバージョンリスト。
適用される安全基準
SF_MutingPar 認定された PLCopen 機能ブロックです。適用される標準の詳細については、「PLCopen – 技術委員会 5 – 安全ソフトウェア」を参照してください。
重要
標準に記載されている要件はユーザーが満たす必要があります。
重要
このブロックはPLCopen仕様から逸脱しています(参照: ステータス図)。
インターフェースの説明
Muting 安全機能を意図的に抑制します。このブロックでは、4 つのミューティング センサーによる並列ミューティングが指定されます。
名前 | データタイプ | 初期値 | 説明、パラメータ値 |
|---|---|---|---|
|
|
| |
|
|
| 変数 出力スイッチング信号
|
|
|
| 変数 ミューティングセンサー11のステータス。
注: 安全要件に応じて、 |
|
|
| 変数。 ミューティングセンサー12のステータス。
注: 安全要件に応じて、 |
|
|
| 変数。 ミューティングセンサー21のステータス。
注: 安全要件に応じて、 |
|
|
| 変数 ミューティングセンサー22のステータス。
注: 安全要件に応じて、 |
|
|
| 変数または定数 ミューティングランプの状態を表示します。
|
|
|
| 絶え間ない 最大不一致時間 「DiscTime11_12、DiscTime21_22、および MaxMutingTime」の注意事項を遵守する必要があります。 |
|
|
| 絶え間ない 最大不一致時間 「DiscTime11_12、DiscTime21_22、および MaxMutingTime」の注意事項を遵守する必要があります。 |
|
|
| 絶え間ない 完全なミュート シーケンスの最大時間。最初のミュート センサーが作動するとタイマーが開始されます。 「DiscTime11_12、DiscTime21_22、および MaxMutingTime」の注意事項を遵守する必要があります。 |
|
|
| 変数または定数。 マシンサイクルで必要なときにミューティング機能の開始をアクティブにする制御システムのコマンド。ミューティング機能を開始した後、この信号をオフにすることができます。
|
|
|
| |
|
|
|
DiscTime11_12、DiscTime21_22、およびMaxMutingTime
拡張レベルの開発者への注意: DiscTime11_12、 DiscTime21_22、 そして MaxMutingTime 入力は定数値に設定する必要があります。つまり、呼び出し時にこれらの値を変更してはいけません。
名前 | データタイプ | 初期値 | 説明、パラメータ値 |
|---|---|---|---|
|
|
| |
|
|
| 安全指向の出力。ミューティング アプリケーションの非絶縁ガード状態を示します。
|
|
|
| ミュート処理のステータスを表示します。
|
|
|
| |
|
|
|
重要
ミューティングセンサー信号の短絡、またはこれらの信号をサポートする機能アプリケーションエラーは、この機能ブロックでは検出されませんが、不正なミューティングシーケンスとして解釈されます。(データタイプ BOOL (安全ではない)、機能的なユーザー ハードウェアまたはソフトウェアによって提供されます。) ただし、これによって不要なミュートが発生することはありません。ユーザーは、それぞれのリスク分析でこれを考慮する必要があります。

機能説明
ミューティングとは、安全機能を意図的に抑制することです。これは、たとえば、機械を停止させずに材料を危険区域に輸送する必要がある場合に必要です。ミューティングはミューティング センサーによってトリガーされます。2 つまたは 4 つのミューティング センサーを使用し、生産プロセスに正しく統合することで、ライト グリッドがミュートされている間、危険区域に人が入らないようにする必要があります。ミューティング センサーには、フェイルセーフである必要のない近接スイッチ、光電子バリア、リミット スイッチなどがあります。アクティブなミューティング モードは、インジケータ ランプによって表示する必要があります。
ミューティング方法には、順次ミューティングと並列ミューティングがあります。このブロックでは、4 つのミューティング センサーを使用した並列ミューティングが使用されます。トランスポートの順方向の実行を以下に示します。FB は、順方向と逆方向の両方向で使用できます。ミューティングは、改ざんを防ぐために、プロセスからの MutingEnable 信号によってアクティブ化する必要があります。
機能ブロックの入力パラメータには、4つのミューティングセンサー(MutingSwitch11、 MutingSwitch12、 MutingSwitch21、 そして MutingSwitch22)、 OSSD 「アクティブ光電子保護装置」の信号 S_AOPD_In、および3つのパラメータ化可能な時間(DiscTime11_12、 DiscTime21_22、 そして MaxmutingTime)。
注意
の S_StartReset 入力は、S-PLC の起動時に危険な状況が発生しないことが保証されている場合にのみアクティブ化されるものとします。
いいえ。 | 画像 | 説明 |
|---|---|---|
1 | 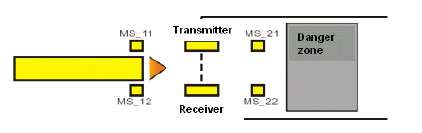 | ミュートセンサーが |
2 | 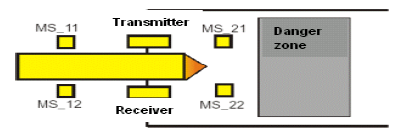 | ミュートモードは、 |
3 | 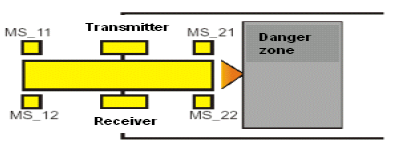 | ミュートセンサーの前 |
4 | 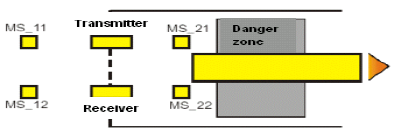 | ミュートモードは次のいずれかのときに終了します。 |
ステータス図
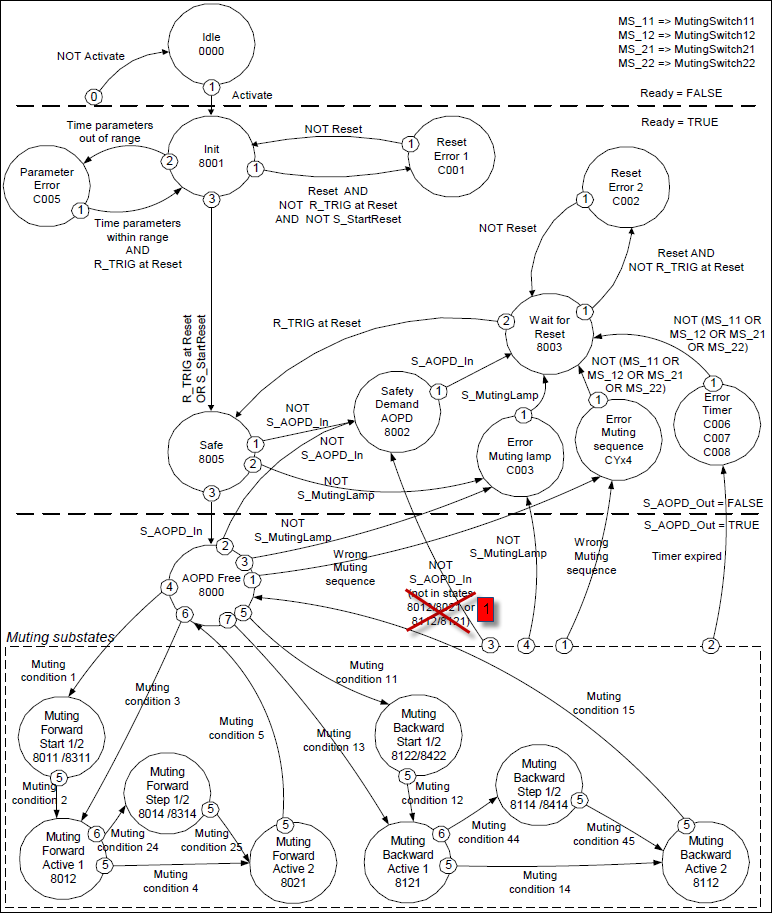
重要

NOT S_AOPD_In 州のみ 8011/80311 または 8122/8422
これは PLCopen 仕様からの逸脱を表します。
ヒント
注: 任意の状態から Idle 州、によって開始された Activate = FALSEは表示されません。いずれの場合も、これらの遷移が最も優先されます。
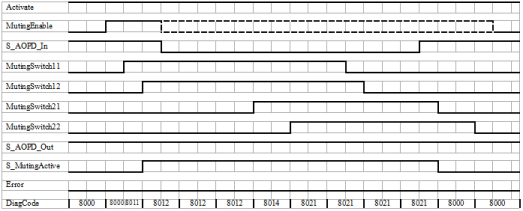
典型的なタイミング図
ミュート条件
ミュート条件1(ステータスへ)
16#8011) (MS_11最初に作動した入力センサー)タイマーを開始DiscTimeEntryそしてMaxMutingTime:MutingEnable AND (R_TRIG at MS_11 AND NOT MS_12 AND NOT MS_21 AND NOT MS_22)ミュート条件1(ステータスへ)
16#8311) (MS_12最初に作動した入力センサー)タイマーの開始MaxMutingTimeそしてDiscTime11_12:MutingEnable AND (NOT MS_11 AND R_TRIG at MS_12 AND NOT MS_22)ミュート条件2(ステータスから
16#8011) (MS_122番目の減衰入力センサーです。タイマーを停止します。DiscTime11_12:MutingEnable AND (MS_11 AND R_TRIG at MS_12 AND NOT MS_21 AND NOT MS_22)ミュート条件2(ステータスから
16#8311) (MS_112番目の減衰入力センサーです。タイマーを停止します。DiscTime11_12:MutingEnable AND(R_TRIG at MS_11 AND MS_12 AND NOT MS_21 And NOT MS_22;ミュート条件3 (両方の入力センサーが同じサイクルで作動します)。タイマーの開始
Timer MaxMutingTime:MutingEnable AND (R_TRIG at MS_11 AND R_TRIG at MS_12 AND NOT MS_21 AND NOT MS_22)ミュート条件4 (すべてのセンサーが作動):
MS_11 AND MS_12 AND MS_21 AND MS_22ミューティング条件24(
16#8014) (MS_21最初に作動した出力センサー)タイマーを開始DiscTime21_22:MS_11 AND MS_12 AND R_TRIG at MS_21 AND NOT MS_22ミューティング条件24(
16#8314) (MS_22最初に作動した出力センサーです。タイマーを開始:DiscTime21_22:MS_11 AND MS_12 AND NOT MS_21 AND R_TRIG at MS_22ミューティング条件25(から
16#8014) (MS_222番目に作動する出力センサーです。タイマーを停止します。DiscTime21_22:MS_11 AND MS_12 AND MS_21 AND R_TRIG at MS_22ミューティング条件25(から
16#8314) (MS_212番目に作動する出力センサーです。タイマーを停止します。DiscTime21_22:MS_11 AND MS_12 AND R_TRIG at MS_21 AND MS_22ミュート条件5 (出力センサーの 1 つが作動) タイマーを停止します。
MaxMutingTime:NOT MS_11 AND NOT MS_12 AND (F_TRIG at MS_21 OR F_TRIG at MS_22)
ミューティング条件11(
16#8122) (MS_21最初に作動するセンサーです。タイマーの開始MaxMutingTimeそしてDiscTime21_22:MutingEnable AND (NOT MS_22 AND R_TRIG at MS_21 AND NOT MS_11 AND NOT MS_12)ミューティング条件11(
16#8422) (MS_22最初に作動した入力センサーです。タイマーの開始MaxMutingTimeそしてDiscTime21_22:MutingEnable AND (R_TRIG at MS_22 AND NOT MS_21 AND NOT MS_11 AND NOT MS_12)ミューティング条件12(
16#8122) (MS_222番目に作動する入力センサーです。タイマーを停止します。DiscTime21_22:MutingEnable AND (MS_21 AND R_TRIG at MS_22 AND NOT MS_11 AND NOT MS_12)ミューティング条件12(
16#8422) (MS_21 は 2 番目に作動する入力センサーです)。タイマーを停止します。DiscTime21_22:MutingEnable AND (R_TRIG at MS_21 AND MS_22 AND NOT MS_11 AND NOT MS_12)ミューティング条件13 (両方の入力センサーが同じサイクルで作動します)。タイマーを開始:
MaxMutingTime:MutingEnable AND (R_TRIG at MS_21 AND R_TRIG at MS_22 AND NOT MS_11 AND NOT MS_12)ミュート条件14 (すべてのセンサーが作動):
MS_11 AND MS_12 AND MS_21 AND MS_22ミューティング条件44(
16#8114) (MS_11最初に作動した出力センサーです。タイマーを開始:DiscTime11_12:MS_21 AND MS_22 AND R_TRIG at MS_11 AND NOT MS_12ミューティング条件44(
16#8414) (MS_12最初に作動した出力センサーです。タイマーを開始:DiscTime11_12:MS_21 AND MS_22 AND NOT MS_11 AND R_TRIG at MS_12ミューティング条件45(から
16#8114) (MS_122番目に作動する出力センサーです。タイマーを停止します。DiscTime11_12:MS_21 AND MS_22 AND MS_11 AND R_TRIG at MS_12ミューティング条件45(から
16#8414) (MS_112番目に作動する出力センサーです。タイマーを停止します。DiscTime11_12: MS_21 AND MS_22 AND R_TRIG at MS_11 AND MS_12ミュート条件15 (2つの出力センサーのうち1つが作動)タイマーを停止
MaxMutingTime:NOT MS_21 AND NOT MS_22 AND (F_TRIG at MS_11 OR F_TRIG at MS_12)
州
16#8000:(MutingEnable = FALSE when muting sequence starts) OR((MS_11 OR MS_12) AND (MS_21 OR MS_22))OR(R_TRIG at MS_11 AND MS_12 AND NOT R_TRIG at MS_12) OR(R_TRIG at MS_12 AND MS_11 AND NOT R_TRIG at MS_11) OR(R_TRIG at MS_21 AND MS_22 AND NOT R_TRIG at MS_22) OR(R_TRIG at MS_22 AND MS_21 AND NOT R_TRIG at MS_21) OR((MS_11 AND NOT R_TRIG at MS_11) AND (MS_12 AND NOT R_TRIG at MS_12)) OR((MS_21 AND NOT R_TRIG at MS_21) AND (MS_22 AND NOT R_TRIG at MS_22))状態
16#8011:NOT MutingEnable OR NOT MS_11 OR MS_21 OR MS_22状態
16#8311:NOT MutingEnable OR NOT MS_12 OR MS_21 OR MS_22状態
16#8012:NOT MS_11 OR NOT MS_12状態
16#8021:R_TRIG at MS_11 OR R_TRIG at MS_12 OR R_TRIG at MS_21 OR R_TRIG at MS_22状態
16#8014:NOT MS_11 OR NOT MS_12 OR NOT MS_21状態
16#8314:NOT MS_11 OR NOT MS_12 OR NOT MS_22状態
16#8122:NOT MutingEnable OR MS_11 OR MS_12 OR NOT MS_21状態
16#8422:NOT MutingEnable OR MS_11 OR MS_12 OR NOT MS_22状態
16#8121:NOT MS_21 OR NOT MS_22状態
16#8112:R_TRIGat MS_11 OR R_TRIG at MS_12 OR R_TRIG at MS_21 OR R_TRIG at MS_22状態
16#8114:NOT MS_21 OR NOT MS_22 OR NOT MS_11状態
16#8414:NOT MS_21 OR NOT MS_22 OR NOT MS_12
エラー検出
DiscTime11_23そしてDiscTime21_22以下の値に設定されましたT#0sまたはそれ以上T#4s。MaxMutingTimeより小さい値に設定されましたT#0sまたはそれ以上T#10min。センサーペアの不一致時間
MutingSwitch11/MutingSwitch12またはMutingSwitch21/MutingSwitch22超過しました。ミュート機能(
S_MutingActive = TRUE)が最大ミュート時間を超えるMaxMutingTime。ミュートセンサー
MutingSwitch11、MutingSwitch12、MutingSwitch21そしてMutingSwitch22間違った順序でアクティブ化されました。ミュートシーケンスは、
MutingEnable。ミューティングランプの故障は次のように表示されます。
S_MutingLamp = FALSE。ステータスで静的リセット条件が検出されました
8001そして8003。
エラー動作
エラーイベントが発生した場合、出力は S_AOPD_Out そして S_MutingActive 設定されている FALSE。 DiagCode 出力には関連するエラーコードが表示され、 Error 出力は TRUE。
エラー状態が明らかになり、オペレータがリセットして安全な状態を確認するまで、再起動は防止されます。
FB固有のエラーおよびステータスコード
| 像名 | ステータスの説明と出力設定 |
|---|---|---|
|
| ステータスのブロックアクティブ化後に静的リセット条件が検出されました
|
|
| ステータスで静的リセット条件が検出されました
|
|
| ミュートランプでエラーが検出されました
|
|
| ステータスのミュートシーケンスでエラーが検出されました
Y = シーケンス内のステータス (順方向の場合は 6 つのステータス、逆方向の場合は 6 つのステータス)。
x = エラー発生時のセンサーの状態(4ビット: |
|
|
|
|
| タイミングエラー: アクティブミュート時間(
|
|
| タイミングエラー: 切り替え時間の不一致
|
|
| タイミングエラー: 切り替え時間の不一致
|
| 像名 | ステータスの説明と出力設定 |
|---|---|---|
|
| 機能ブロックはアクティブではありません(基本状態)。
|
|
| ミュートがアクティブでなく、安全要件もなし
|
|
| ブロックが有効になりました。
|
|
| 安全要求を検出
|
|
| 安全要件またはエラーが検出され、現在は解消されています。リセットによるオペレータの確認が要求されています。
|
|
| 安全機能が作動しました
|
|
| ミュートフォワードシーケンスは、立ち上がりトリガーエッジの後に開始フェーズにあります。
|
|
| ミュートフォワードシーケンスは、立ち上がりトリガーエッジの後に開始フェーズにあります。
|
|
| ミュート転送シーケンスがアクティブになっている場合、次のいずれかになります。
または
監視
|
|
| ミュート順方向シーケンスがアクティブです。
|
|
| ミュート順方向シーケンスがアクティブです。
|
|
| ミュートフォワードシーケンスはまだアクティブです。
|
|
| ミュート逆方向シーケンスは、立ち上がりトリガーエッジ後の開始フェーズにあります。
|
|
| ミュート逆方向シーケンスは、立ち上がりトリガーエッジ後の開始フェーズにあります。
|
|
| ミュート逆方向シーケンスがアクティブの場合、次のいずれかになります。
または
監視
|
|
| ミュート逆方向シーケンスがアクティブです。
|
|
| ミュート逆方向シーケンスがアクティブです。
|
|
| ミュート逆方向シーケンスはまだ有効です。
|