例: ファイルオーバー EtherCAT
製品: CODESYS EtherCAT
説明
この例では、CAN over で SDO を読み書きする方法を示します。 EtherCAT ファイルオーバーでファームウェアファイルをダウンロードするだけでなく、 EtherCAT。また、アクティブなスレーブの数やスレーブの状態など、マスターとスレーブに関する情報を取得する方法も示します。ハードウェアとして、CAN over EtherCAT を備えた 2 つのアナログ端子が使用されます。 File-over-EtherCAT 機能は理論的にはハードウェアを使用せずに実装されます。
追加情報
デバイス構成のさまざまな起動パラメータを設定できます。 CAN over EtherCAT を使用するデバイスの場合、インデックスとサブインデックスが各パラメータに使用されます。各パラメータの値は、数値または最大 4 バイトのバイト配列として読み書きできます。
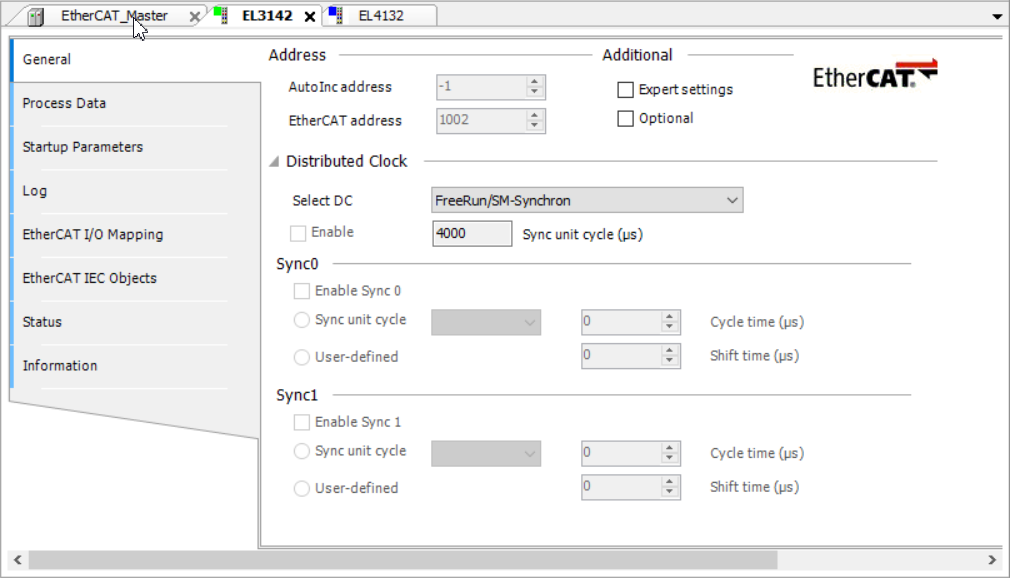 |
のパラメータ EL4132 と EL3142 起動前に設定されます。これらのデバイスのいずれかをダブルクリックすると、 起動パラメータ タブが表示されます。 1 つの開始パラメータがすでに設定されており、次のパラメータを使用できます。 新しい ボタンをクリックして、さらに開始パラメータを選択します。の 全般的 タブには、 EtherCAT 後でデバイスを選択するために使用されるアドレス。の中に EtherCAT_マスター の下のタブ 全般的 タブでは、デバイスが接続されている正しい送信元アドレスを設定する必要があります。
 |
CoE: まず、プログラムは、 EtherCAT マスターは準備ができています。その後、すでに設定されているパラメータがデバイス 1002 からバイト配列で読み取られ、 DWORD。さらに、4 バイトのパラメータが書き込まれ、その後読み出されます。この例では4バイトを超えるパラメータも書き込まれています。
ここまではパラメータ値のみが使用されていましたが、完全なエントリをバイト配列に読み取ることもできます。これらの値はデバイス固有です。すべての機能ブロックには、 udiSdoAbort 変数。操作がキャンセルされた場合、この変数は中止コードを返します。このコードのエラーは CANopen 仕様に記載されています。
FoE: この機能はファイルオーバーの使用方法を示します。 EtherCAT 架空のファームウェアをダウンロードします。後に EtherCAT マスターの準備が整い、完全なファームウェア用のメモリが割り当てられます。次に、特定のスレーブがブート モードに設定され、ファームウェアをダウンロードします。ダウンロードが完了するとメモリが解放されます。
アップロード機能はファームウェアの例とは直接関係がありません。これは、インスタンスがどのように呼び出されるかを示すだけです。
システム要件と制限事項
プログラミングシステム | CODESYS Development System (バージョン 3.5.14.0 以降) |
ランタイムシステム | CODESYS Control Win (バージョン 3.5.14.0) |
アドオンコンポーネント | - |
注記
 ダウンロード プロジェクト
ダウンロード プロジェクト