例:サーボドライブオーバー EtherCAT
製品: CODESYS EtherCAT
説明
この例は、ServoDriveを使用してIDNを読み書きする方法を示しています EtherCAT。ハードウェアとしては、レックスロスのインドドライブが使われています。また、このデバイスをServoDriveを使用する別のデバイスと交換することもできます EtherCAT。
追加情報
デバイス構成でいくつかの起動パラメータを設定できます。これらのパラメータは、ServoDrive を使用するデバイスの IDN と呼ばれます。 EtherCAT。 IDN ごとに、名前、属性、単位、最小値、最大値、および値を数値または最大 4 バイトのバイト配列として設定できます。
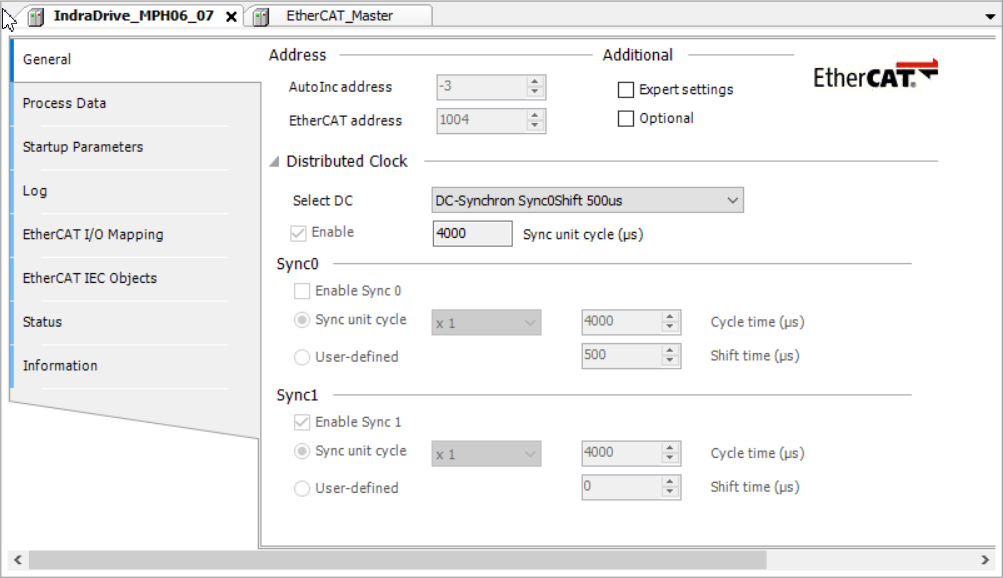 |
2 つの起動パラメータが最初に設定されています。見てください 起動パラメータ デバイス上のタブ。の 全般的 タブには、 EtherCAT デバイスの選択に使用されるアドレス。のために EtherCAT_Master 下のデバイス 全般的 タブでは、デバイスが接続されている正しい送信元アドレスを設定する必要があります。
 |
SoE: まず、プログラムは、 EtherCAT マスターは準備ができています。その後、IDN 番号 32 がデバイスから読み取られます。 1001 これは起動時にすでに設定されています。さらに、IDN がデバイスに書き込まれ、その後 UINT 値およびバイト配列としてもう一度読み取られます。
IDN の名前、属性、単位、最小値、最大値、および値を読み取ることができます。これを行うには、次の特定の値を使用します。 byElem。 」byDrive使用するデバイスにはチャネル (= 軸) が 1 つしかないため、値は設定されません。 EtherCAT マスターはに設定されています usiCom そしてアドレスは uiDevice。デバイスによっては、タイムアウトを十分に高く設定する必要がある場合があります。
システム要件と制限事項
プログラミングシステム | CODESYS Development System (バージョン 3.5.14.0 以降) |
ランタイムシステム | CODESYS Control Win (バージョン 3.5.14.0) |
アドオンコンポーネント | - |
注記
 ダウンロード プロジェクト
ダウンロード プロジェクト