CODESYS Depictor 編集者(ライセンス)
ライセンス版と有料版では CODESYS Depictor エディター( CODESYS ストア)、利用可能な表示と編集ができます Depictor オブジェクトを作成し、ローカル変数を入力します。
とは異なります CODESYS Depictor ビューア、ツリーに新しいポーズと要素を追加して、それぞれのプロパティビューで構成することもできます。 3Dビューには、ツリーに記述されている構造全体が表示されます。
とは異なります CODESYS Depictor ビューア、 CODESYS Depictor Editorは、次の拡張機能を提供します。
The CODESYS メインウィンドウには、で作業するためのコマンドボタンを備えた追加のツールバーが含まれています CODESYS Depictor 編集者。
プロパティエディタには、より多くの編集オプションがあります。
インターフェイスエディタは、 Depictor にあるオブジェクト POU 見る。次に、これらの種類のオブジェクトを他のオブジェクトで参照できます Depictor オブジェクトを作成し、それに応じてインターフェイス変数を割り当てます。
A カメラ ビューが提供され、3Dビューのカメラ設定を管理できます。これらの設定には、IECコードを使用してアクセスします。
A 点灯 ビューが提供され、3Dビューを照明するための複数の光源を構成できます。
A 鳥の目 シーンの概要を取得できるビューが提供されます。あなたは Depictor オブジェクト、光源、およびカメラ。カメラビューは常に上から(シーンのz軸内)です。
ポーズ間の親子関係を円柱の形で3Dビューに表示できます。
3Dビューでの作業:ポーズ、要素、カメラの位置、ポーズの接続
3Dビューで作業している場合、次のコマンドのボタンがのツールバーで使用できます。 CODESYS メインウィンドウ:
 | ポーズを追加:ツリーで選択したエントリの下にポーズが追加されます。 定義:A ポーズ は、親ノードに対する子ノードの変換を示しています。たとえば、すべての子ノードは、親ノードに対して7単位移動する必要があります。 |
 | 要素を追加:ツリーで選択したエントリの下に要素が追加されます。 定義: エレメント の中に CODESYS Depictor の実際の3Dジオメトリが含まれています Depictor 物体。 3Dジオメトリはファイルから作成することも、既存のジオメトリを参照することもできます Depictor 物体。 |
 | レンダリングビューからカメラの位置を取得し、それをDepictorのカメラの位置に追加します。コマンドに対応します カメラの位置を取得する。 |
 | Depictorで選択したカメラ位置を3Dビューのカメラ位置に設定します:コマンドに対応 カメラの位置を設定する。 3Dビューでの表現はそれに応じて変化します。 |
 | スクリーンショットを作成する: デフォルト 名前を付けて保存 ダイアログが開きます。現在の3Dビューをに保存できます |
 | ポーズのつながりを表示する:すべての要素は、3Dビューでワイヤモデルとして描画されます。ポーズ間の接続は緑色の円柱で表示されます。シリンダーの厚さは、 Depictor オプション。 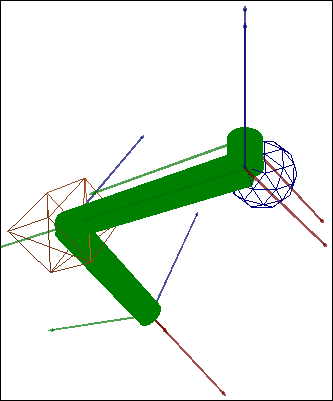 |
コマンド ポーズを追加 と 要素を追加 内のオブジェクトのコンテキストメニューで利用可能です 木 見る。
プロパティ ポーズのビュー
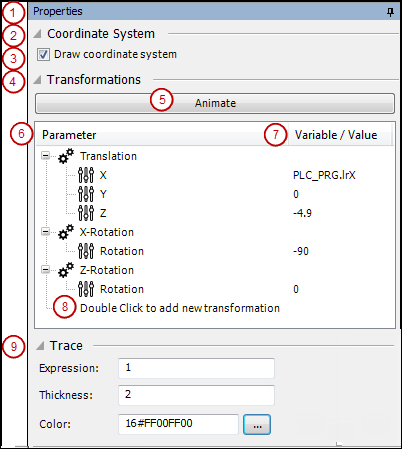
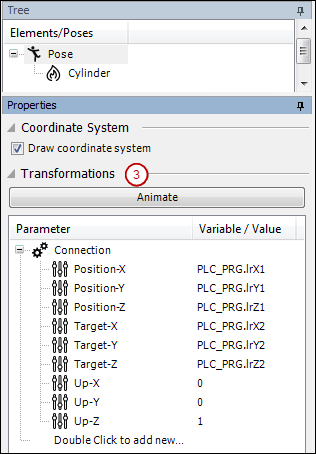
この図は、 プロパティ (1)サンプル値のあるポーズの。
座標系 (2)、 座標系を描く (3):ポーズに対してこのオプションを選択すると、ツリー構造での選択に関係なく、位置と変換の座標系が継続的に表示されます。
ポーズを公開する:このオプションは、POUプール内のオブジェクトでのみ使用できます。オプションを有効にすると、ポーズは、を参照するすべての要素にすぐに表示されます。 Depictor 物体。ポーズを個別に変更し、その下に独自の要素を含めることができます。
ボタン アニメート (5):3Dビューで定義された順序でポーズのすべての変換をアニメーション化します。で定義された値 価値 列はから1秒以内にインクリメントされます
0また1次に到達した値に。このようにして、各変換が3Dビューのモデルにどのように影響するかを簡単に確認できます。変換 (4):次の表では、ポーズのすべての翻訳が実行順に(上から下)表示されています。
パラメータ 列(6):変換タイプとそのプロパティ
値/変数 列(7):それぞれの変換プロパティを説明する値、変数、または式。オフラインモードでは、 CODESYS Depictor 式を直接評価し、値を決定しようとします。オンラインモードでは、式はライブで評価されます。式を評価できない場合(オフラインまたはオンライン)、または式が空の場合、 CODESYS Depictor 以前に決定された値を使用しようとし、最後に使用します
0(またFALSE)。あなたは編集することができます 値/変数 桁。両方の組み合わせからの変数とIEC式に加えて、数値が許可されます(例: "
q + p*2 + 5")。式の場合、グローバルIEC変数または関連するインターフェイスの変数を使用できます。 Depictor POUプール内のオブジェクト。選択したトランスフォーメーションのコンテキストメニューで、次のコマンドを使用できます。 上に移動 また 下に移動 テーブル内、およびコピーまたは削除。
表の最後に変換を追加できます。 ダブルクリックして新しい変換を追加します (8)。リストボックスには、可能な変換タイプが表示されます。
翻訳(X / Y / Z)
X回転
Y回転
Z回転
スケーリング(X / Y / Z)
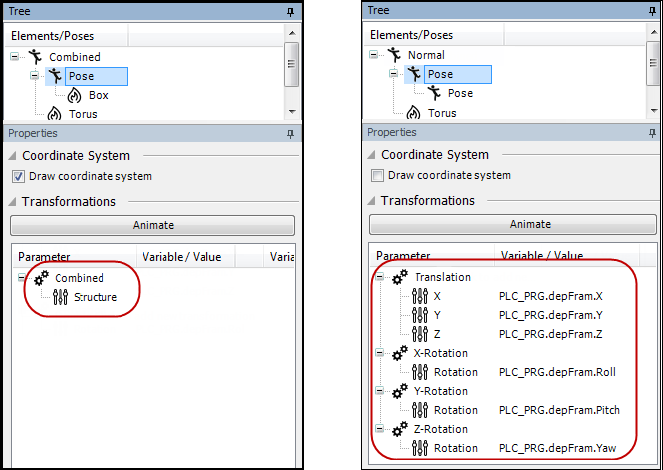
組み合わせる (構造):特定のX / Y / Zパラメーターを使用する代わりに、構造化変数を指定することにより、平行移動と回転が組み合わされます。この目的のために、フレーム変数を使用して構造を定義できます
X、Y、Z、Pitch、Yaw、 とRoll。別の方法として、DepictorFrameからの構造DepictorBase図書館。これについては、次の例を参照してください。繋がり:この変換タイプは、2点間のスペースで引き伸ばされる要素を作成するために使用され、その動きは自動的に適応される必要があります。たとえば、これは動的に出入りするロボットアームです。この目的のために、制限された空間ポイントと方向ベクトルの両方の位置を指定するだけで済みます。そうして CODESYS Depictor 接続要素のポーズを計算し、自動的にスケーリングします。ポーズのプロパティでは、次の値が指定されています。これらは、ツリーのポーズの下に挿入された接続線に対して独自の座標系を定義します。
原点位置: 位置X、 位置Y、 位置Z
目標位置: ターゲットX、 ターゲットY、 ターゲットZ
方向: アップX、 アップY、 アップZ (アップベクトル)
これについては、次の例を参照してください。
痕跡 (9):これらのプロパティは、TCPのモーションパスを描画するかどうか、および描画する方法を定義するために使用されます。
表現:式または定数(
0:パスは描画されません。1:パスを描画します。2:パスを削除)線幅:描画されたパスの線幅
色:描かれたパスの色
DepictorFrameTYPE DepictorFrame :
STRUCT
X : LREAL;
Y : LREAL;
Z : LREAL;
Yaw : LREAL;
Pitch : LREAL;
Roll : LREAL;
END_STRUCT
END_TYPE
PROGRAM PLC_PRG
VAR
rCount : LREAL;
depFram : DepictorBase.DepictorFrame;
END_VAR
rCount := rCount + 0.01;
depFram.X := COS(rCount)*4;
depFram.Y := SIN(rCount)*4;
depFram.Z := COS(rCount) * SIN(rCount) * 4;
depFram.Yaw := rCount*4;
depFram.Pitch := rCount*8;
depFram.Roll := rCount*12;エディターのエントリー:構成テーブル 変換 ポーズの、タイプ 組み合わせる、 桁 変数/値: PLC_PRG.depFram
構造の上の複合変換の構成(左)と、平行移動と回転の個々のパラメーターの上の同等の構成(右)については、次の画像を参照してください。
The CODESYS Depictor 伸縮シリンダーの動きを表示する必要があります。空間内の動きと円柱の長さの変化は、空間内の2点の現在の位置に自動的に適応する必要があります。この目的のために、円柱のポーズに変換タイプ「接続」を使用し、空間ポイントと方向ベクトルの両方を指定します。次に、シリンダーに常に必要な平行移動が次のように自動的に計算されます。 CODESYS Depictor。
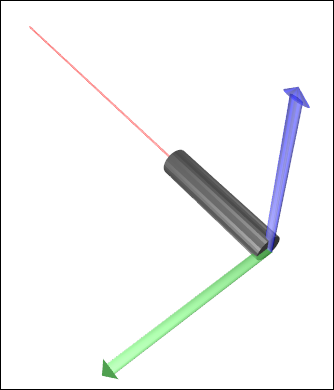
あなたは「Cylinder"のポーズの下の要素 木 の Depictor オブジェクト(1)。
その場合、要素は Depictor ライブラリからの参照。
を構成します シリンダー の要素 プロパティ 次のように(2)を表示します。
の中に 基本 タブ(2)、変換(3)を設定します。
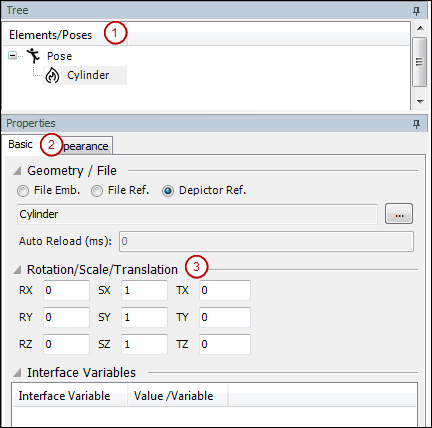
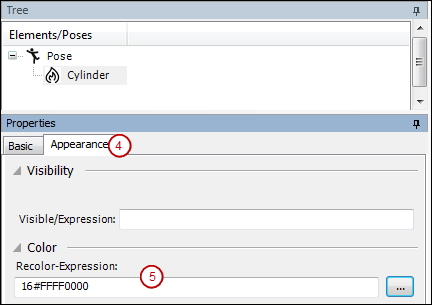
の中に 外観 タブ(4)、色(5)を設定します。
次に、ポーズを設定します シリンダー の中に プロパティ/変換 次のように(3)を表示します。
の動きを制御する Depictor アプリケーションプログラムによるオブジェクト
アプリケーション、PLC_PRG
PROGRAM PLC_PRG
VAR
lrRun : LREAL;
lrX1 : LREAL := 0;
lrY1 : LREAL;
lrZ1 : LREAL;
lrX2 : LREAL := 2;
lrY2 : LREAL;
lrZ2 : LREAL;
END_VARlrRun := lrRun + 0.01; lrX1 := COS(lrRun)*2; lrX2 := SIN(lrRun)*2 + 2; lrY1 := SIN(lrRun*2)*3; lrY2 := COS(lrRun*2)*3; lrZ1 := COS(lrRun/2); lrZ2 := SIN(lrRun/2);
プロパティ 要素のビュー
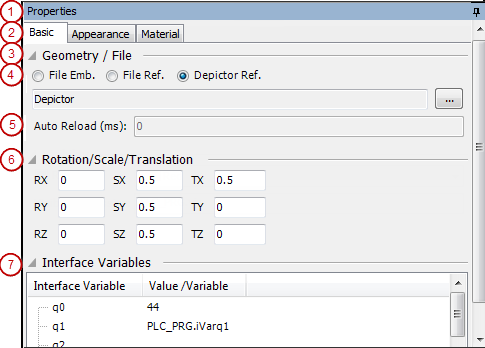
The プロパティ エディター(1) Depictor 要素はタブで構成されます 基本 と 外観。そうでない要素の場合 Depictor 参考文献、 素材 タブ。
基本 タブ(2):
ジオメトリソースを定義し、要素に追加のX / Y / Z変換を設定します。要素が Depictor インターフェイスを定義した参照、次にの割り当てを実行できます インターフェイス変数 (9)テーブルで。詳細については、の説明を参照してください。 CODESYS Depictor 視聴者。
ジオメトリ/ファイル (3):要素のジオメトリソースの選択
ファイルの埋め込み。 (4):埋め込まれた3Dファイル
ファイル参照 (4):参照された3Dファイル。設定された時間の後にリロード 自動リロード。
Depictor 参照。 (4):参照 Depictor 物体
ファイルを選択するには、をクリックします
 ボタンをクリックして、ファイルを開くためのデフォルトのダイアログを開きます。 CODESYS 現在、次のファイル形式をサポートしています。
ボタンをクリックして、ファイルを開くためのデフォルトのダイアログを開きます。 CODESYS 現在、次のファイル形式をサポートしています。COLLADA((.dae)。注:に関連付けられているテクスチャファイル
COLLADA-COLLADAファイルと同じディレクトリに配置する必要があります。ウェイバーフロント ((
.obj)。3D Studio ((
.3ds)。ポリゴンファイル形式((
.ply)。
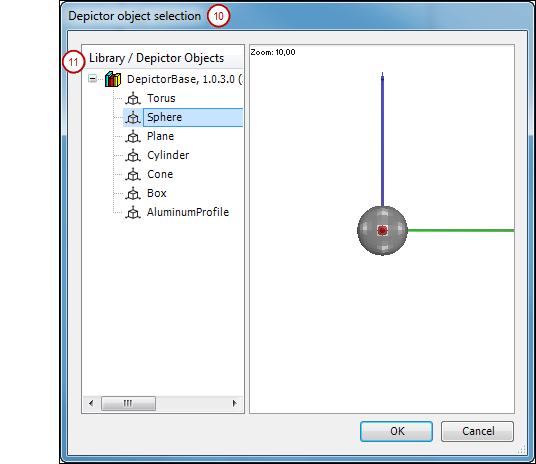
The 記述子オブジェクトの選択 を選択するためのダイアログが開きます Depictor 参照(10):
全て Depictor POUプールに直接またはライブラリとして挿入されたオブジェクトが左側に表示されます(11)。オブジェクトエントリをクリックすると、右側にプロジェクトのプレビューが開きます。プレビューは、の他の3Dビューと同じように機能します。 CODESYS Depictor 編集者(または CODESYS Depictor ビューア)。クリック わかった 選択したオブジェクトを参照します。
次のオプションに注意してください。オブジェクトのプロパティエディタから、POUプール内の個々のポーズを「公開」できます。要素内のプールからそのようなオブジェクトを参照すると、公開されたポーズはツリー内の要素の下に表示され、個別に調整できます。たとえば、これにより、使用のすべての領域で、定義されたベース多関節アームロボットのより多くのグリッパーを後で追加およびカスタマイズできます。
自動リロード(5):ジオメトリソースがタイプの場合にのみ使用可能 ファイル参照。参照ファイルをリロードする時間間隔(ミリ秒単位)
平行移動/回転/スケール (6):要素に追加の静的X / Y / Z変換を定義できます。これを行うには、テキストフィールドに数値を指定します。
翻訳:TX、 TY、 TZ
回転: 処方箋、 RY、 RZ
規模: SX、 SY、 SZ
インターフェイス変数 (7):操作については、ヘルプページを参照してください。 CODESYS Depictor ビューアー:「ビュー 'プロパティ'」。
外観 タブ(1):
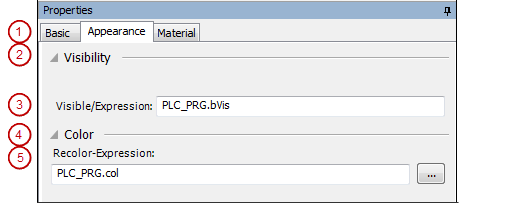
可視性 (2): 可視/発現 (3):指定されたブール変数または 表現 アプリケーションまたは Depictor オブジェクトはTRUEです。
色 (4): 表現の色を変える (5):要素はここで指定された色で完全に色が変更されます。テクスチャも使用されておらず、参照されている既知の色も使用されていません CODESYS Depictor オブジェクト。色を指定するには、タイプのアプリケーション変数を指定できます STRING (例: Application.PLC_PRG.strCol)または正確な色の値(例: 16#FFFF8040)。色を選択するためのデフォルトのダイアログを開くには、入力フィールドの後ろにあるボタンをクリックします。注:色の変更は、公開されたポーズの下の要素には影響しません。
素材 タブ(1):
このタブは、として挿入されていない要素でのみ使用できます。 Depictor 参照。
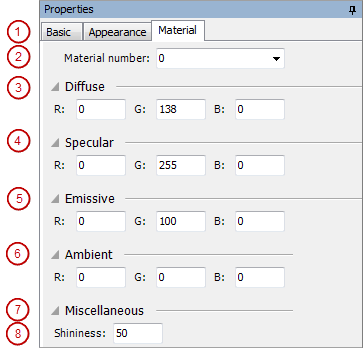
材料番号 (2):モデル内のマテリアルを指定します
ここで、次の材料特性を変更できます。
びまん性
スペキュラー
発光
アンビエント
光沢
のDepictorオブジェクト CODESYS Application Composer
の CODESYS Application Composer、宣言されたモジュールをDepictorオブジェクトにリンクできます。これにより、モジュールツリーを3Dモデルとして表示できます。
インターフェース のビュー Depictor POUプール内のオブジェクト
のインターフェースを作成できます Depictor プロジェクトのPOUプールにあるオブジェクト。この種のオブジェクトをで開くと CODESYS Depictor 編集者、別の インターフェース ビューを使用できます。デフォルトでは、エディターの左端にあるタブとして非表示になっています。それは含まれています Depictor 宣言エディター。
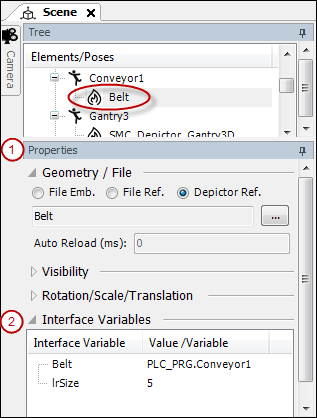
の入力変数を宣言します Depictor オブジェクト、通常の機能ブロックの場合 CODESYS。インターフェイスで宣言されたすべての変数は、 Depictor オブジェクト、たとえばポーズの変換にリンクされます。あなたが参照するとき Depictor ツリー内の要素内のオブジェクト(描写者Ref。)、変数はにリストされています インターフェイス変数 プロパティエディタのセクション。ユースケースの値または式をそこに入力できます。
ヒント
インターフェイス変数の入力は、両方で可能です。 CODESYS Depictor ビューアと CODESYS Depictor 編集者。
A Depictor 「Belt」という名前のオブジェクトがプロジェクトのPOUプールに作成され、インターフェイスは次のように定義されます。
VAR_INPUT
Belt: Conveyor;
lrSize: LREAL;
END_VARで「ベルト」オブジェクトを参照する場合 Depictor 要素の場合、セクションのプロパティエディタ(1)で変数に値またはアプリケーション変数を入力できます インターフェイス変数 (2):
カメラ 意見
The  カメラ ビューには2つのセクションがあります。 カメラの位置 と カメラのプロパティ:
カメラ ビューには2つのセクションがあります。 カメラの位置 と カメラのプロパティ:
セクション「カメラの位置」
の3Dビューで使用されるカメラの位置 CODESYS Depictor オブジェクトは、オブジェクトに従ってリストされて保存されます。位置は、3Dビューからダイアログに適用することも、ダイアログからビューに適用することもできます。暗黙の変数を使用して、IECコードのカメラ位置にアクセスできます。
カメラの位置は次のように定義されます。
索引:で始まる整数番号
0目:カメラ位置のベクトル座標
目標:カメラターゲット
上:カメラの視野角
選択したカメラ位置のコンテキストメニューには、標準コマンド(削除、切り取り、貼り付け、コピー)に加えて、次のコマンドが含まれています。
 カム位置を上に移動:テーブル内の位置を1単位上に移動します
カム位置を上に移動:テーブル内の位置を1単位上に移動します カム位置を下に移動:テーブル内の位置を1単位下に移動します
カム位置を下に移動:テーブル内の位置を1単位下に移動します- カメラの位置を取得する:3Dビューで直接操作できる場合、3Dビューで検出されたカメラ位置は、のカメラ位置に一覧表示されます。 カメラ 見る。
- カメラの位置を設定する:3Dビューで直接操作できる場合は、カメラ位置のリストで選択された位置が3Dビューで設定されます。 3Dビューはそれに応じて適応します。
IECコードからのカメラ位置へのアクセス:
ライブラリのバージョン1.0.1.0以降の場合 DepictorBase プロジェクトにリンクされている場合は、 CODESYS Depictor オブジェクトは自動的にGVLを生成します <name of Depictor object> とともに Camera 変数。
The Camera 変数にはサブコンポーネントが含まれます Position タイプの DepictorBase.DepictorCameraPosition と xUsePosition タイプの BOOL。の個々の構成に応じて Depictor 物体、 Camera 配列を含めることもできます pCameraPositions タイプの ARRAY ... OF DepictorBase.DepictorCameraPosition。この配列は、オブジェクトの定義されたカメラ位置を記述します。配列内のカメラ位置の数は、変数によって定義されます uiNumberOfCameraPosition タイプの UINT。
これらの暗黙の変数を使用して、IECコードでカメラを制御できます。コードを作成するときは、関数「リストコンポーネント」を使用して、のサブコンポーネントにアクセスします。 <Depictor object>.Camera。 IECコードからの位置情報は、設定した場合にのみ使用されます xUsePosition に TRUE、その後、3Dビューで直接対話することはできなくなります。ビューの周りに赤い枠で示されます。
ライブラリは両方を受け取ります InterpolateCameraPosition 機能ブロックと DepictorCameraPosition カメラの位置を定義するための構造。このブロックは、新しいブロックへの補間に使用されます DepictorCameraPosition 定義された時間内に。これにより、新しい位置が設定されるとすぐにアニメーション化されたカメラの動きが可能になります。
セクション「シーンの背景」
背景色 | シーンの背景の色。色のデフォルトのリストボックスで設定できます |
次のテクスチャでSkydomeをアクティブにします |
|
テクスチャをインポートする | テクスチャのファイルを選択するためのデフォルトのダイアログを開きます。可能なファイルタイプ: |
クリアな質感 | 指定したテクスチャファイルが設定から削除されます。 |

セクション カメラのプロパティ
自動カメラを使用する |
|
レベルを閉じる | オブジェクトがこのレイヤーよりも近い場合、そのオブジェクトは表示されなくなります。 |
遠い層 | オブジェクトがこのレイヤーよりも遠い場合、そのオブジェクトは表示されなくなります。 |
視野(FOV) | 視野:カメラの開き角度。 |
点灯 意見
ライティングビューでは、3Dビューでシーンをライティングするための複数の光源を設定できます。各光源は、テーブル内のノードとして表示され、その下にプロパティがあります。
これについては、以下も参照してください。 3Dビュー、鳥瞰図、および照明構成の例。
自動照明を使用する | 3Dオブジェクトの周囲のX / Y / Z軸に6つの光源が自動的に配置されるため、使用するマテリアルに応じてシーンが最適に照らされます。 |
ライト/プロパティ | 価値 |
|---|---|
ライトタイプ | 光源の種類
|
位置 | X / Y / Z-座標系の光源の値(たとえば、 |
拡散色 | 照明の拡散光の色。例: |
スペキュラーカラー | 照明のミラーリングされたライトの色(たとえば、 |
アンビエントカラー | 照明の周囲光の色(たとえば、 |
半径 | 光の最大拡散半径 |
一定の減衰 | 光の半径の経路での光の一定のフェードの値 |
線形減衰 | 光の半径のパスでの光の線形フェージングの値 |
二次減衰 | 光の半径の経路における光の2次フェージングの値 |
方向 | タイプの光源の光の方向 方向性 と スポット |
フォールオフ | 光源タイプ「スポット」の内側コーンから外側コーンへのパスでの光の減衰 |
インナーコーン | 光源タイプ「スポット」の内側の光円錐の半径 |
アウターコーン | 光源タイプ「スポット」の外側の光円錐の半径 |
のコンテキストメニュー  光源ノードには、標準コマンド(削除、切り取り、貼り付け、コピー)に加えて、次のコマンドが含まれています。
光源ノードには、標準コマンド(削除、切り取り、貼り付け、コピー)に加えて、次のコマンドが含まれています。
 カメラの位置/方向にライトを設定します:光源の位置と方向には、カメラと同じ値が含まれています。
カメラの位置/方向にライトを設定します:光源の位置と方向には、カメラと同じ値が含まれています。 バードビューで光の半径を表示:光源に設定された半径は、鳥瞰図で隆起した円としてカラーで表示されます。
バードビューで光の半径を表示:光源に設定された半径は、鳥瞰図で隆起した円としてカラーで表示されます。
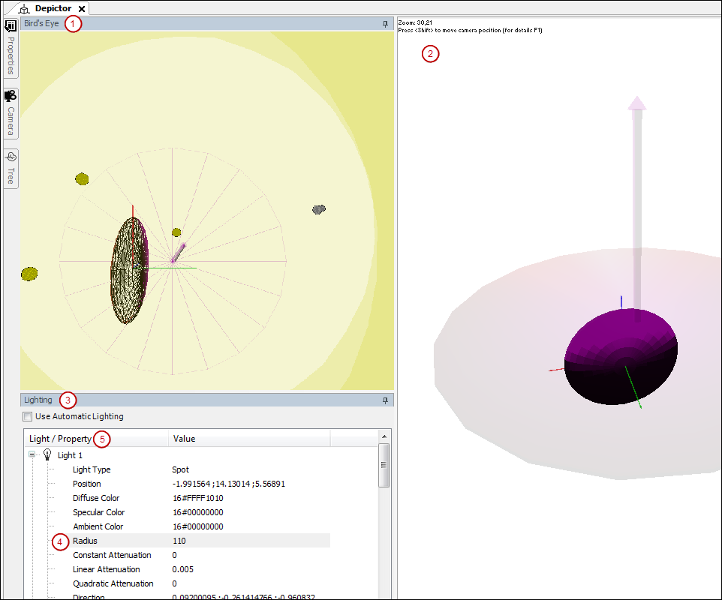
鳥の目 意見
The  鳥の目 ビューは、3Dビューの現在のシーンの概要を提供します。カメラは灰色の円筒形のオブジェクトとして表示され、光源は黄色の円錐形のオブジェクトとして表示されます。
鳥の目 ビューは、3Dビューの現在のシーンの概要を提供します。カメラは灰色の円筒形のオブジェクトとして表示され、光源は黄色の円錐形のオブジェクトとして表示されます。
これについては、以下も参照してください。 3Dビュー、鳥瞰図、および照明構成の例。
3Dビューと同様に、マウスを動かしてシーン全体の表示角度を変更できます。ただし、カメラの位置は常にシーンのZ軸上にあります。ズームは、カメラから中心までの距離のみを変更します。
を選択すると バーズアイビューで光の半径を表示する のオプション 点灯 光源のビューでは、点灯している領域が黄色の円で表示されます。
3Dビュー、鳥瞰図、および照明構成の例
バーズアイビュー(1)と3Dビュー(2)のポーズについては、次の画像の例を参照してください。照明ビュー(3)を構成することにより、シーンは3つの光源(5)も取得します。これらの光源は、鳥の目で黄色のオブジェクトとして表示されます。光源の半径(4)は、バーズアイビューでオブジェクトの周りに黄色の重なり合う円として表示されます。鳥瞰図では、カメラは灰色の円錐形のオブジェクトとして表示されます。 3Dビューの矢印軸の影付きの円形領域も鳥瞰図にあり、オブジェクトもフレームモデルとして描画されます。これは、両方のビューでオブジェクト上のカメラの現在の視線方向を検出するのに役立ちます。