Robot articolato a 6 assi
Trasformazione di un robot a braccio articolato con sei assi rotanti e sei gradi di libertà (DoF). I tre assi di orientamento del braccio del robot si intersecano in un punto: il centro del giunto.
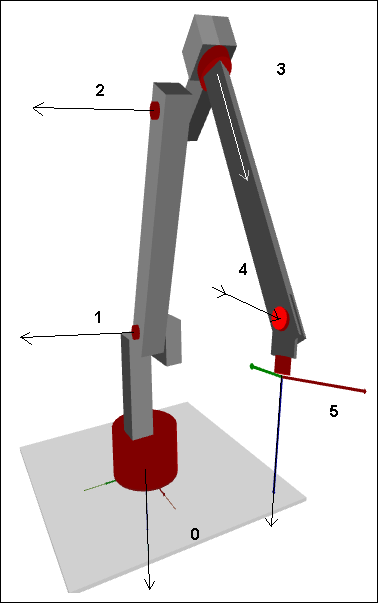
Il SMC_Trafo_ArticulatedRobot_6DOF e SMC_TrafoF_ArticulatedRobot_6DOF i blocchi funzione implementano le trasformazioni in avanti e inversa di un robot a braccio articolato con sei assi di rotazione. Nell'immagine, il sistema di coordinate cartesiane è contrassegnato in basso sull'asse 0. L'asse z punta verso il basso e l'asse x punta in avanti nella direzione del punto centrale dell'utensile (TCP). L'origine del sistema di coordinate cartesiane è l'asse di intersezione 0 e la parte inferiore del robot.
Definizione di assi
Gli assi rotanti sono identificati da frecce nere. Il senso di rotazione positivo è dato dalla regola della mano destra. Ad esempio, quando l'asse 0 viene ruotato in direzione positiva, il robot ruota in senso orario se visto dall'alto.
Assi 0, 1, 3 e 4: ]-180°, 180°[
Asse 2: [-90°, 180°]
Asse 5: Senza restrizioni; la portata può essere maggiore di 360°.
Posizione di riferimento e dimensioni
La figura a sinistra mostra la posizione di riferimento della cinematica, ovvero la posizione in cui tutti gli assi si trovano nella posizione zero. Immettere le dimensioni mostrate qui nella struttura di configurazione SMC_TrafoConfig_ArticulatedRobot_6DOF uno. I nomi e i segni dei parametri sono conformi alla convenzione Denavit-Hartenberg. La figura a destra mostra il parametro aggiuntivo Denavit-Hartenberg d3.
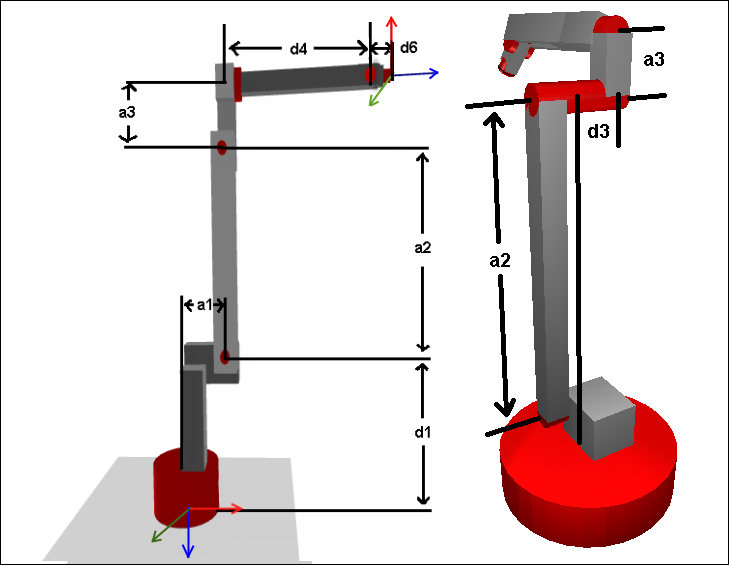
a1, a3, d4 e d6 devono essere >= 0
a2 deve essere > 0 (>
g_fSMC_CNC_EPS)d1 deve essere <= 0
Compensazione congiunta (sigma_i) | Spostamento leva (d_i) | Lunghezza leva (a_i) | Rotazione della leva (alpha_i) | |
|---|---|---|---|---|
1 | 0° | d1 | a_1 | -90° |
2 | 90° | 0 | a_2 | 0° |
3 | 0° | d3 | a_3 | 90° |
4 | 0° | d4 | 0 | 90° |
5 | 0° | 0 | 0 | -90° |
6 | 0° | d6 | 0 | 0° |
Programmazione
La posizione del centro dell'utensile è controllata con X, Y e Z. Le unità di X, Y e Z sono le stesse utilizzate per i parametri a_i e d_i (ad esempio: mm). L'orientamento è controllato in gradi con A (imbardata), B (inclinazione) e C (rotazione).
Oggetti di trasformazione
La struttura dei dati SMC_TrafoConfig_ArticulatedRobot_6DOF e i blocchi funzione SMC_Trafo_ArticulatedRobot_6DOF e SMC_TrafoF_ArticulatedRobot_6DOF essere con SM3_CNC integrato.