Cinematica del pallettizzatore a 4 assi
La cinematica del pallettizzatore a 4 assi è un tipo di robot generico che viene utilizzato frequentemente per attività di pallettizzazione. La cinematica è dotata di quattro assi rotativi controllati (contrassegnati in rosso) e di un quinto asse rotativo meccanico (contrassegnato in grigio). Il Pallettizzatore SMC_Trafo_4Axis e SMC_TrafoF_4AxisPallettizzatore Le POU implementano la sua trasformazione in avanti e inversa.
Il sistema di coordinate cartesiane è la base per il pallettizzatore. L'asse Z punta in basso perpendicolarmente e l'asse X "in avanti", il che significa nella direzione in cui punta il braccio nella direzione zero degli assi. L'origine del sistema di coordinate cartesiane è l'intersezione dell'asse 1 del giunto e la parte inferiore del robot.
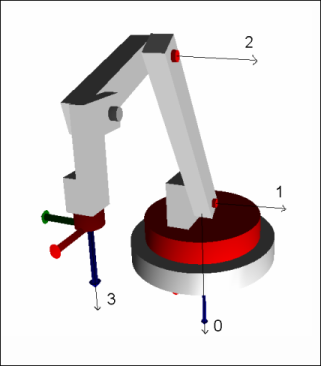
Definizione di assi
L'immagine seguente mostra il senso di rotazione dei quattro assi. Le frecce nere corrono lungo l'asse del giunto. Il senso di rotazione è determinato secondo la regola della mano destra: se il pollice della mano destra punta verso il basso lungo la freccia, il senso di rotazione positivo è nella direzione del dito leggermente curvo. Ad esempio, se visto dall'alto, la direzione di rotazione positiva dell'asse 0 è in senso orario, mentre gli assi 1 e 2 si inclinano "in avanti" per la rotazione positiva.
La cinematica è dotata di quattro assi rotativi controllati (vedi assi rossi a0, a1, a2, a3) e un quinto asse rotativo meccanico (vedi asse M di colore grigio).
Asse 0: ]-180°, 180°[
Asse 1: [-90°, 90°]
Asse 2: [-180°, 90[
Asse M: asse rotante meccanico. Nessuna restrizione
Asse 3: illimitato; la portata può essere anche maggiore di 360°
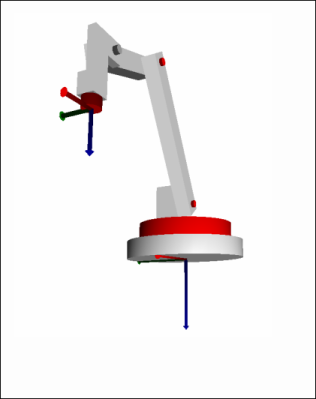
Posizione zero e dimensioni
L'immagine mostra la cinematica in posizione zero di tutti gli assi. Nella posizione zero, gli assi del sistema di coordinate utensile corrono paralleli a quelli del sistema di coordinate macchina. Specificare le dimensioni indicate nella struttura di configurazione SMC_TrafoConfig_4AxisPallettizzatore Specificare anche tutto a_i con segni positivi e tutto d_i con segni negativi. I nomi dei parametri sono secondo la convenzione Denavit-Hartenberg.

Offset giunto (sigma_i) | Distanza articolare (d_i) | Lunghezza elemento braccio (a_i) | Torsione (alfa_i) | |
|---|---|---|---|---|
1 | 0° | d_1 | a_1 | 90° |
2 | -90° | 0 | a_2 | 0° |
3 | 90° | 0 | a_3 | 0° |
4 | 0° | 0 | a_4 | 90° |
5 | 0° | d_5 | 0 | 180° |
Programmazione in codice G
La posizione della pinza è controllata con X, Y e Z. La rotazione della pinza sulla verticale è controllata dall'asse aggiuntivo C. Gli angoli sono specificati in gradi.
Oggetti
La struttura dei dati SMC_TrafoConfig_4AxisPalletizer e il SMC_Trafo_4AxisPalletizer e SMC_TrafoF_4AxisPalletizer i blocchi funzione sono collegati alla libreria SM3_Transformation. Per una descrizione dei parametri, cercare questi oggetti in Library Manager.