Cinematica parallela
Treppiede ad assi lineari
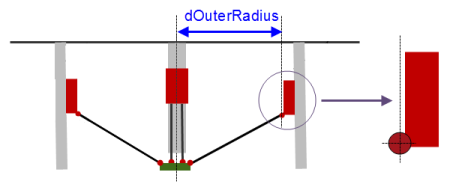
Questo sistema ha tre azionamenti lineari che si trovano ad un angolo definito l'uno rispetto all'altro. Gli azionamenti sono costituiti da 3 binari con slitte traslanti. La piastra portautensili è collegata alle slitte di traslazione mediante bielle della stessa lunghezza. Un set accoppiato di bielle tiene la piastra portautensili parallela al pavimento con lo stesso orientamento. La cinematica può spostare la piastra portautensili in tre dimensioni.
La trasformazione in avanti e inversa di queste cinematiche è calcolata in SMC_Trafo_Tripod_Lin e SMC_TrafoF_Tripod_Lin POU. L'angolo dell'asse del treppiede è definito dall'angolo tra la guida e l'asse verticale (dAxisAngle).
Requisiti meccanici e sistema di coordinate
Le lunghezze dei 3 assi sono identiche.
Le lunghezze delle bielle sono identiche.
La distanza tra le coppie di bielle è identica per tutte le coppie.
L'angolo dell'asse tra le rotaie di trasmissione e l'asse verticale è identico per tutti e tre gli azionamenti. L'angolo di tolleranza è compreso tra 0° e 90°.
L'asse definisce il movimento del punto tra i giunti di biella sui cursori.
Il sistema di coordinate XYZ è destrorso. I vettori X e Y sono orizzontali e Z punta verso l'alto. L'origine è definita in modo che l'intersezione dei tre assi di movimento con il piano XY (grafico sotto: punti A) sia su un cerchio nella posizione [0,0,0].
Nome | Descrizione |
|---|---|
| Distanza dal centro della piastra portautensili ai punti di presa delle bielle 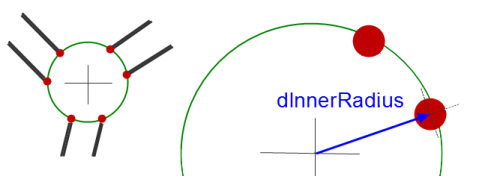 |
| 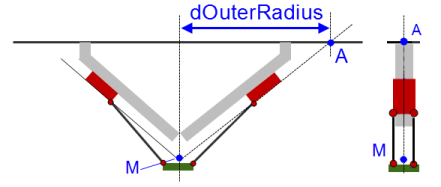 Il punto A è l'intersezione dell'asse con il piano XY. |
| Lunghezza delle bielle |
| Distanza tra le due bielle in una coppia |
| Il punto A del primo asse definisce l'asse X per impostazione predefinita. L'offset viene utilizzato per ruotare l'intera struttura attorno all'asse Z. In questo caso, il punto A non è più sull'asse X. 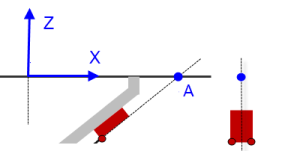 |
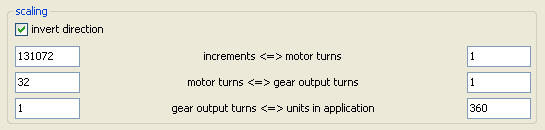
| L'offset viene utilizzato per impostare il valore di posizione dell'asse sull'impostazione predefinita di zero. 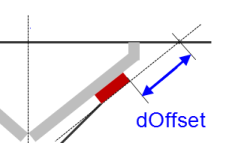 |
| |
| |
Troverai informazioni su altri parametri nella descrizione della libreria. | |
Treppiede ad assi verticali
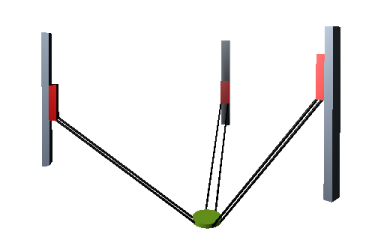
Questo sistema è una variante speciale del progetto cinematico sopra descritto e presenta gli stessi requisiti meccanici. L'angolo dAxisAngle tra le rotaie di guida e l'asse verticale è 0° e le rotaie di guida sono parallele all'asse verticale.
La trasformazione in avanti e inversa di queste cinematiche è calcolata in SMC_Trafo_Tripod_Lin e SMC_TrafoF_Tripod_Lin blocchi funzione. L'angolo dell'asse del treppiede è definito dall'angolo tra la guida e l'asse verticale (dAxisAngle).
Nome | Descrizione |
|---|---|
| Il parametro definisce il raggio del cerchio che è descritto dai sei punti di presa delle bielle alla piastra portautensile. 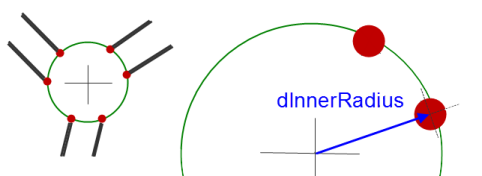 |
|  |
| Lunghezza delle bielle |
| Distanza delle coppie di bielle tra loro |
| Il punto A del primo asse definisce di default l'asse X. L'offset viene utilizzato per ruotare l'intera struttura attorno all'asse Z. In questo caso, il punto A non è più sull'asse X. 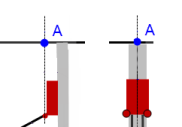 |
| L'offset viene utilizzato per impostare il valore di posizione dell'asse sull'impostazione predefinita di zero. 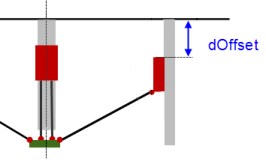 |
| |
| |
Troverai informazioni su altri parametri nella descrizione della libreria. | |
Treppiede con assi rotanti
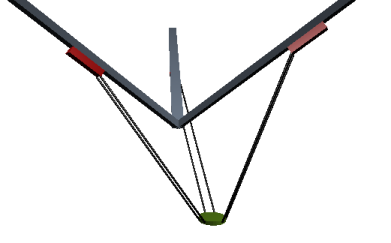
Per i treppiedi, la cinematica è implementata da 3 azionamenti rotanti collegati alla piastra portautensili tramite bracci e bielle.
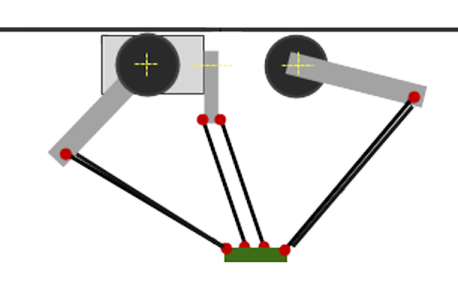
L'origine del sistema di coordinate è la posizione del centro della piastra portautensili quando tutti e 3 i bracci sono in posizione orizzontale.
La trasformazione in avanti e inversa di queste cinematiche è calcolata in SMC_TRAFO_Tripod_Arm e SMC_TRAFOF_Tripod_Arm blocchi funzione.
Requisiti meccanici e sistema di coordinate
Le lunghezze dei tre assi sono identiche.
Le lunghezze delle bielle sono identiche.
La distanza tra le coppie di bielle è identica per tutte le coppie.
Nome | Descrizione |
|---|---|
| 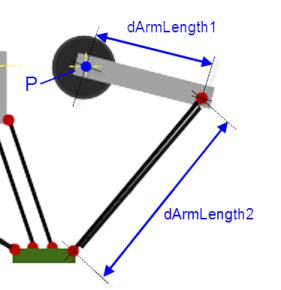 |
| |
| Il parametro definisce il raggio del cerchio che viene stabilito dai 3 punti P degli azionamenti. 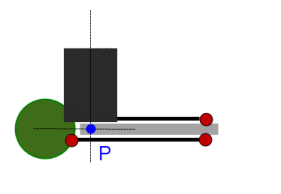 |
| Il parametro definisce il raggio del cerchio che è descritto dai 6 punti di presa delle bielle alla piastra portautensile. 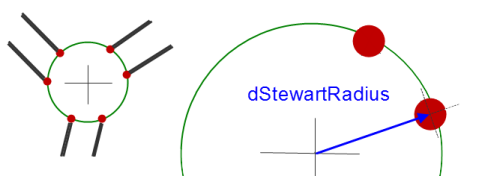 |
| Distanza tra le due bielle in una coppia |
| |
| |
| |
Troverai informazioni su altri parametri nella descrizione della libreria. | |
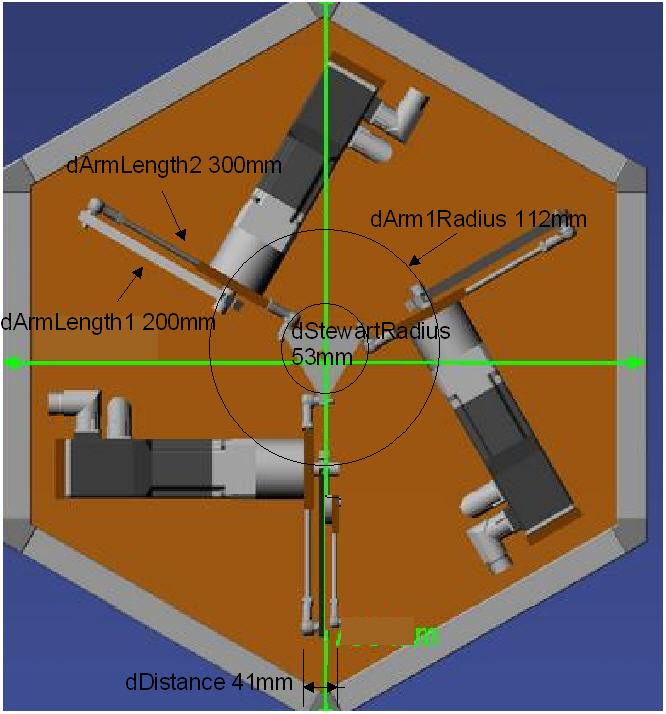
L'immagine mostra la posizione zero di tutti gli assi. (I tre bracci superiori sono orizzontali.) L'MCS è mostrato sulla piastra dell'utensile. Le frecce sugli assi A0, A1 e A2 indicano il senso di rotazione degli azionamenti secondo la regola della mano destra.
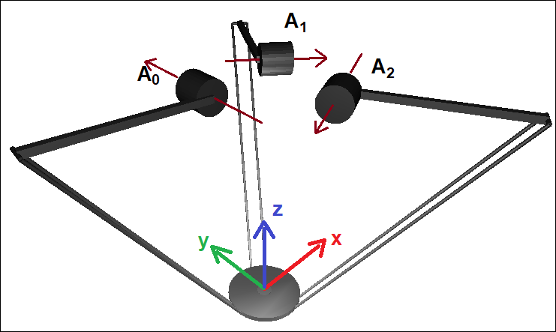
Sistema di coordinate macchina (MCS) | |
Origine | Definito nel punto medio della piastra portautensili quando tutti e 3 i bracci superiori (quelli collegati direttamente con A0, A1 o A2) sono in posizione orizzontale |
X | Dall'origine, punta lontano dal primo motore (A0), parallelo al segmento del braccio superiore del primo braccio |
Y | Determinato da X e Z in modo che l'MCS sia destrorso |
Z | Ortogonale alla piastra portautensili Punti dalla piastra dell'utensile in direzione dei motori |
Le rispettive trasformazioni vengono eseguite dalle seguenti POU SMC_TRAFO_Tripod_Arm e SMC_TRAFOF_Tripod_Arm:
Impostazioni di trasformazione
tta: SMC_TRAFO_Tripod_Arm := (dArmLength1:=200, dArmLength2:=300, dArm1Radius:=112, dStewartRadius:=53,dDistance:=41,dMaxAngleBallJoint:=60); ttaf: SMC_TRAFOF_Tripod_Arm := (dArmLength1:=200, dArmLength2:=300, dArm1Radius:=112, dStewartRadius:=53,dDistance:=41);