Unità di azionamento accoppiate
Gli azionamenti accoppiati appartengono a un dispositivo che rappresenta l'azionamento all'interno della topologia del bus di campo. I simboli di questi azionamenti hanno un piccolo segno che indica il tipo di bus di campo corrispondente. Ad esempio, ogni servoazionamento standard è collegato al controller tramite un bus di campo.
Quando si utilizzano unità, CODESYS SoftMotion fornisce descrizioni dei dispositivi specifiche per il master bus di campo (suffisso "_SoftMotion"). Questi hanno parametri di base ottimizzati per l'azionamento.
Importante
Per azionamenti utilizzati con CODESYS SoftMotion, la gestione del modulo deve essere disattivata nell'azionamento. La gestione del modulo viene eseguita da CODESYS SoftMotion nel controllore. Se possibile, l'intervallo di spostamento massimo dovrebbe essere impostato su 32 bit.
Aggiunta di un dispositivo di azionamento accoppiato (EtherCAT)
Requisito: nel progetto è inserito un controllore compatibile con SoftMotion.
Seleziona il SoftMotion controller nell'albero dei dispositivi.
Nel menu contestuale, fare clic su .
Nel Aggiungi dispositivo finestra di dialogo, selezionare il dispositivo.
Clicca il Aggiungi dispositivo pulsante.
Il dispositivo viene aggiunto all'albero dei dispositivi. Il Aggiungi dispositivo la finestra di dialogo rimane aperta.
Seleziona il dispositivo che hai appena aggiunto all'albero dei dispositivi.
Nel Aggiungi dispositivo finestra di dialogo, selezionare uno slave SoftMotion ().
Clicca il Aggiungi dispositivo pulsante.
Il dispositivo viene aggiunto all'albero dei dispositivi.
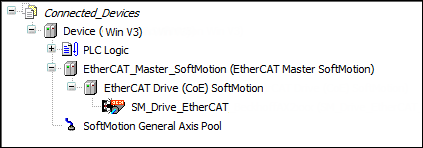
Facendo doppio clic sul dispositivo si apre l'editor del dispositivo corrispondente.