Sistemi di coordinate
CODESYS SoftMotion Robotics fornisce diversi sistemi di coordinate in cui è possibile comandare i movimenti.
Sistema di coordinate degli assi (ACS)
Sistema di coordinate degli utensili (TCS)
Sistema di coordinate mondiali (WCS)
Sistema di coordinate della macchina (MCS)
Sistema di coordinate del prodotto (PCS_1, PCS_2)
Sistema di coordinate | Descrizione |
|---|---|
Sistema di coordinate degli assi (ACS) | Il sistema di coordinate degli assi definisce un sistema di coordinate nello spazio degli assi in cui ogni asse del robot si estende su una dimensione. Di conseguenza, è possibile specificare una posizione per ciascun asse del robot |
Sistema di coordinate degli utensili (TCS) | Il sistema di coordinate dell'utensile è un sistema di coordinate cartesiane che si trova sul punto centrale dell'utensile (TCP) della cinematica. La sua posizione e il suo orientamento dipendono dalla posizione del robot |
Sistema di coordinate mondiali (WCS) | Il sistema di coordinate mondiali è un sistema di coordinate cartesiane statico e costituisce la base per tutti i sistemi di coordinate successivi. Questi sono definiti rispetto al sistema di coordinate mondiali |
Sistema di coordinate della macchina (MCS) | Il sistema di coordinate macchina è un sistema di coordinate cartesiane statiche. La posizione e l'orientamento dell'MCS rispetto al robot fisico sono definiti dalla Le Trasformazione di coordinate MC_Set il blocco funzione può essere utilizzato per spostare il sistema di coordinate rispetto al sistema di coordinate mondiali (WCS). |
Sistema di coordinate del prodotto (PCS_1, PCS_2) | I sistemi di coordinate del prodotto sono sistemi di coordinate cartesiane che possono essere definiti dall'utente. Sono espressi rispetto al sistema di coordinate mondiali (WCS) e possono essere statici o dinamici . Statico
. Dinamico I seguenti blocchi funzione possono essere utilizzati per definire sistemi di coordinate dinamici: |
Posizione iniziale e orientamento dei sistemi di coordinate
La cinematica del robot determina la posizione iniziale e l'orientamento dei sistemi di coordinate. Questo è descritto nella documentazione della cinematica
Posizione e orientamento del sistema di coordinate della macchina (MCS) rispetto al robot fisico
Posizione e orientamento del punto centrale dell'utensile (TCP) rispetto al MCS e quindi al sistema di coordinate dell'utensile (TCS)
Posizione zero del robot e direzioni di rotazione o movimento dei singoli assi
Il sistema di coordinate mondiali (WCS) e i sistemi di coordinate del prodotto (PCS_1, PCS_2) non sono inizialmente spostati e sono identici al sistema di coordinate macchina.
Robot e pezzi in lavorazione multipli
La posizione e l'orientamento dei sistemi di coordinate sono definiti per ogni robot. Quando più robot lavorano insieme, può essere utile definire il sistema di coordinate mondiali (WCS) come un sistema di coordinate di base comune. In base a questo sistema di coordinate, è possibile spostare i sistemi di coordinate macchina (MCS) e i sistemi di coordinate del prodotto (PCS_1, PCS_2)
Esempio
Esempio di utilizzo di un robot con due giunti rotanti (a0 e a1)
Cinematica
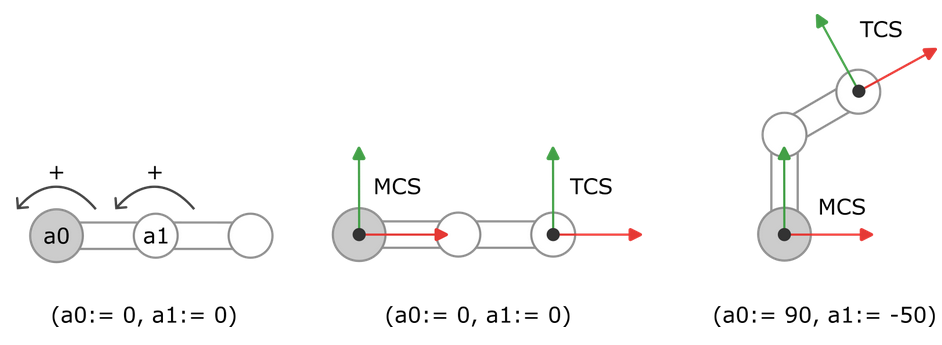
La cinematica definisce la posizione zero del robot (come mostrato di seguito). L'origine del sistema di coordinate della macchina si trova sull'asse di rotazione dell'asse a0. L'asse X punta nella direzione del primo collegamento quando si trova la posizione del primo a0 è 0. L'asse Y punta nella direzione del primo collegamento quando si trova la posizione del primo a0 è +90°. La rotazione in senso antiorario corrisponde alla direzione di rotazione positiva. Il punto centrale dello strumento (TCP) si trova all'estremità del secondo collegamento del robot (come mostrato di seguito) e costituisce l'origine del TCS. Il TCS è allineato in modo tale che l'asse X scorra lungo il secondo
Sistema di coordinate degli assi (ACS)
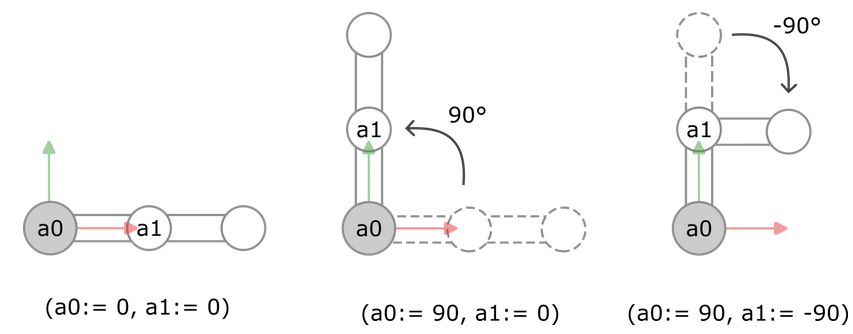
La cinematica ha specificato la posizione zero del robot e il senso di rotazione dei singoli assi. Perché il robot è composto da due assi a0 e a1, possiamo specificare le posizioni degli assi a0 e a1 nell'ACS.
Nella prima immagine, specifichiamo la posizione (a0:= 0, a1:= 0). Ciò corrisponde alla posizione zero del robot.
Nella seconda immagine, specifichiamo la posizione (a0:= 90, a1:= 0). Partendo dalla posizione zero, il primo asse a0 è ruotato 90° nel senso di rotazione positivo. Il secondo asse a1 rimane nella posizione zero.
Nella terza immagine, specifichiamo la posizione (a0:= 90, a1:= -90). Partendo dalla posizione zero, il primo asse a0 è ruotato 90° nel senso di rotazione positivo (come nella seconda immagine). Inoltre, il secondo asse a1 è ruotato 90° nel senso di rotazione negativo.
Sistema di coordinate degli utensili (TCS)
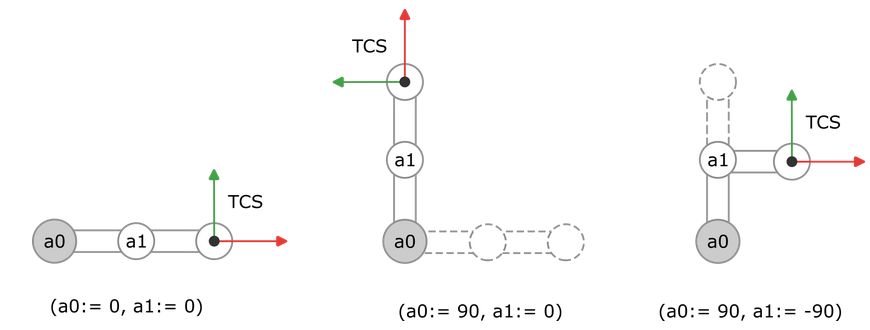
La cinematica definisce la posizione e l'orientamento del TCP e del TCS. A seconda di come spostiamo il robot, cambiano anche la posizione e l'orientamento del
Sistema di coordinate mondiali (WCS), sistema di coordinate macchina (MCS) e sistema di coordinate del prodotto (PCS_1, PCS_2)
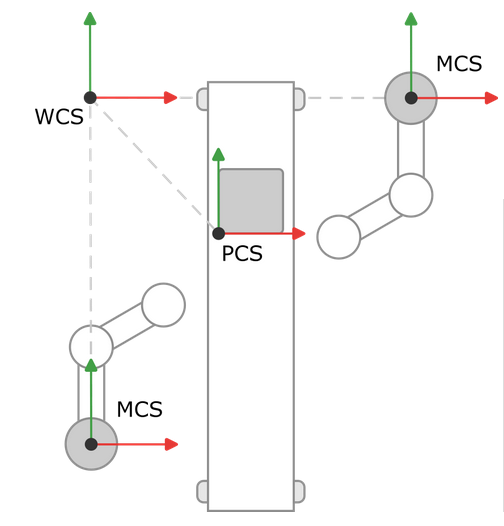
In un capannone di produzione, due robot si trovano a sinistra e a destra di un nastro trasportatore. I robot devono trattare i prodotti sul nastro trasportatore. Definiamo un sistema di coordinate mondiali comune e lo posizioniamo nell'angolo in alto a sinistra del nostro capannone di produzione. Partendo da questo sistema di coordinate, determiniamo la distanza e la rotazione rispetto ai sistemi di coordinate della macchina e al prodotto e spostiamo i sistemi di coordinate
Nell'esempio, tutti i sistemi di coordinate sono allineati allo stesso modo, quindi dobbiamo solo spostare i sistemi di coordinate. Il sistema di coordinate macchina del robot sinistro viene spostato in direzione Y, il sistema di coordinate macchina del robot destro viene spostato in direzione X e il sistema di coordinate del prodotto viene spostato sia in direzione X che in