Sistema di controllo ridondante
È possibile aumentare l'affidabilità del sistema di controllo proteggendo il controller attivo (PLC) con un PLC ridondante.
Il PLC ridondante può subentrare nell'esecuzione dell'applicazione in qualsiasi momento durante il runtime. I ruoli dei PLC attivi e di standby possono essere commutati dinamicamente tra i due controller. Ciò consente di evitare guasti del sistema o di ridurne significativamente l'impatto. I sistemi di controllo ridondanti aumentano l'affidabilità, la disponibilità e la continuità operativa di impianti industriali critici o anche delle macchine di dimensioni più ridotte.
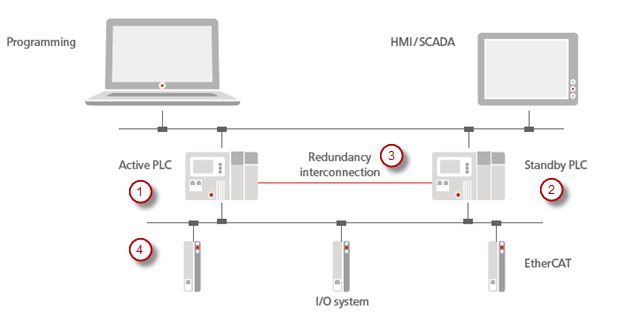
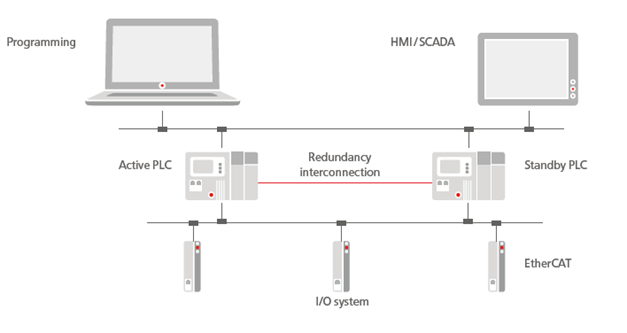
La figura mostra uno scenario di automazione costituito dall'ambiente di sviluppo, dal sistema di controllo ridondante composto da due PLC e da un ambiente macchina collegato tramite bus di campo. L'applicazione viene eseguita in parallelo su due PLC: un PLC è attivo (1), mentre l'altro è in modalità standby (2). Il PLC in modalità standby legge anche gli ingressi del sistema bus di campo collegato (EtherCAT nell'esempio) e si sincronizza continuamente con il PLC attivo tramite il collegamento di ridondanza (3). Ciò consente al PLC in standby di diventare immediatamente attivo in caso di malfunzionamento e di assumere il controllo dei bus di campo (4) senza alcuna interruzione.
Il collegamento di ridondanza (3) utilizza di default il protocollo TCP o UDP. Tuttavia, su richiesta, è possibile garantire la comunicazione anche tramite un componente di comunicazione specifico del produttore.
Inoltre, le visualizzazioni possono essere collegate a un sistema di controllo ridondante quando vengono eseguite come CODESYS WebVisu in un browser. In caso di commutazione, i client di visualizzazione continueranno a funzionare praticamente senza alcuna interruzione.
Avviso

Il video ha lo scopo di fornire una panoramica generale di questa funzionalità. La gamma di funzioni di CODESYS Redundancy Configuration come si vede potrebbe differire dall'attuale gamma di funzioni.

Principi di base della funzionalità
Lo sviluppatore dell'applicazione scarica innanzitutto l'applicazione sul primo PLC e vi crea l'applicazione di avvio. All'avvio, il secondo PLC si sincronizza con questo controllore e acquisisce a sua volta l'applicazione di avvio.
Una volta scaricata e inizializzata l'applicazione di avvio, il PLC è pronto per eseguire il primo ciclo di task. Successivamente, tutte le aree di memoria registrate (tutti i dati IEC) vengono trasferite al secondo PLC. Da questo momento in poi, la ridondanza è attiva ed entrambi i PLC eseguono il task dell'applicazione in modo sincrono. L'esecuzione del task è sincronizzata tramite messaggi scambiati attraverso il collegamento ridondante prima e dopo ogni task IEC.
Non esiste un PLC attivo prestabilito o preferito. La modalità operativa è determinata dalla sequenza di avvio: il PLC che si avvia per primo invia un messaggio all'altro PLC tramite il collegamento di ridondanza. Se non riceve risposta, il PLC avviato carica comunque l'applicazione di avvio e funziona in modalità autonoma.
Se il PLC di riserva non riceve un messaggio dal PLC attivo entro il tempo configurato, riterrà che il PLC attivo abbia subito un malfunzionamento e passerà alla modalità autonoma, assumendo il controllo degli I/O del bus di campo. Allo stesso modo, anche il PLC attivo passa alla modalità autonoma se non riceve messaggi dal PLC di riserva.
Se il primo PLC viene sostituito e riavviato, si sincronizza con l'altro PLC attualmente in modalità standalone come descritto sopra e quindi passa alla modalità standby.
Un PLC in standby può essere commutato in modalità simulazione. Durante questo periodo, la funzionalità di ridondanza rimane disattivata. Anche la connessione al bus di campo rimane disattivata (come in modalità standby). Il PLC attivo passa in modalità autonoma durante questo periodo. La modalità simulazione può essere interrotta tramite risincronizzazione o riavvio. Il controllore che opera in modalità simulazione torna quindi in modalità standby, a condizione che non si verifichino errori durante la sincronizzazione o il riavvio.
Se si verificano errori durante l'aggiornamento dell'applicazione di avvio, durante il trasferimento delle aree di memoria registrate o durante il ciclo di ridondanza, il PLC passa alla modalità di errore. A quel punto, è necessaria una risincronizzazione o un riavvio.
Interfaccia utente
Componente aggiuntivo: CODESYS Redundancy Configuration
Scheda: Stato di ridondanza
In fase di esecuzione, CODESYS monitora il sistema di ridondanza e vi visualizza gli stati correnti. Qui puoi anche accedere ai comandi di ridondanza più importanti e, ad esempio, comandare un passaggio
Scheda: Impostazioni di ridondanza
Qui puoi configurare le impostazioni di comunicazione del link di ridondanza e definire l'attività pertinente e un watchdog.
Scheda: Generale
Scheda: Visualizzazione
Qui è possibile configurare un collegamento di ridondanza tra i server Web in esecuzione ciascuno su un PLC. Di conseguenza, è possibile collegare le visualizzazioni CODESYS WebVisu in un browser, con il sistema di controllo ridondante.
Scheda: Aree Registrate
Qui puoi gestire i dati e le aree che devono essere sincronizzati in fase di esecuzione.
Scheda: Tronco d'albero
Elenca gli eventi storici di ridondanza dal logger del PLC
EtherCAT (CODESYS GmbH Pila)
PROFINET
CAN Open
È possibile configurare il bus di campo nel Configurazione della ridondanza oggetto su Generale scheda del Impostazioni di ridondanza scheda.
Per ulteriori informazioni, vedere: Generale
Libreria: Redundancy
Le Redundancy Implementation libreria, inclusa da Redundancy libreria, fornisce POU come SwitchToActive o SwitchToStandby in modo da poter accedere programmaticamente ai componenti di ridondanza. Ad esempio SwitchToActive per programmare la commutazione dei PLC in modalità attiva.
Libreria: VisuRedundancy
Le VisuRedundancy la libreria implementa il collegamento di ridondanza per la visualizzazione e fornisce blocchi funzionali, ad esempio per monitorare le attività.
Sistema di runtime
Installazione
Il sistema runtime fornisce due componenti principali per il funzionamento ridondante di un sistema di controllo:
Per far funzionare in modo ridondante un sistema di controllo, il
CmpRedundancycomponente di ridondanza e un componente aggiuntivo, che gestisce il collegamento di ridondanza, sono disponibili nel Sistema di esecuzione dei PLC. Questo componente aggiuntivo è specifico del dispositivo, ma è normale un collegamento IP:CmpRedundancyConnectionIP.Questo componente gestisce tutte le funzioni per la gestione delle operazioni di ridondanza, inclusa la distribuzione dei ruoli (attivo/standby), la sincronizzazione dei dati e il monitoraggio degli stati di comunicazione.
Componente per il collegamento di ridondanza
Questo componente è specifico del dispositivo e stabilisce la connessione fisica e logica tra i due controller. La maggior parte dei dispositivi utilizza una connessione basata su IP
CmpRedundancyConnectionIPcomponente.
Funzionalità
Collega due PLC a un sistema ridondante
Sincronizza i dati di ridondanza
Commuta gli stati operativi dei controllori
Registra gli eventi di ridondanza nel logger
Nota
Gli eventi che si verificano in fase di esecuzione vengono registrati su entrambi i dispositivi dai logger dei sistemi di esecuzione.
Il file di configurazione *.cfg per il tempo di esecuzione di a CODESYS Control Win è memorizzato in ProgramData.
[CmpRedundancyConnectionIP] Link1.IpAddressLocal=192.168.56.1 ; IP address of redundancy link of local PLC Link1.IpAddressPeer=192.168.56.101 ; IP address of redundancy link of peer PLC Link1.Port=1205 [CmpRedundancy] BootupWaitTime=5000 TcpWaitTime=2000 StandbyWaitTime=50 ; This timeout depends on the quality of real time task and communication system LockTimeout=20 ; Maximum time of timer lock Bootproject=Application ; Name of your CODESYS application RedundancyTaskName=MainTask ; Task name in your CODESYS application PlcIdent=1 ; PlcIdent=2 on other PLC
Applicazione di avvio
L'applicazione di avvio è memorizzata in modo identico su entrambi i PLC. Quando si desidera aggiornare l'applicazione di avvio, è sufficiente scaricarla sul PLC attivo.
Per eseguire un aggiornamento, è sufficiente caricare la nuova applicazione di avvio sul controller attivo. Il controller di standby riceve automaticamente la versione aggiornata durante la sincronizzazione.