Compito del ciclo dell'autobus - EtherCAT
Comportamento all'inizio
In linea di principio, i dati di input utilizzati per ogni attività IEC vengono letti all'inizio dell'attività ( ) e i dati di output vengono scritti nel driver I/O alla fine dell'attività (
) e i dati di output vengono scritti nel driver I/O alla fine dell'attività ( ). L'implementazione nel driver I/O è decisiva per il trasferimento aggiuntivo dei dati I/O. Determina l'intervallo di tempo e il momento in cui avviene l'effettivo trasferimento al sistema bus corrispondente.
). L'implementazione nel driver I/O è decisiva per il trasferimento aggiuntivo dei dati I/O. Determina l'intervallo di tempo e il momento in cui avviene l'effettivo trasferimento al sistema bus corrispondente.
Il task del ciclo del bus del PLC può essere definito globalmente per tutti i bus di campo nelle impostazioni del PLC. Per alcuni bus di campo, tuttavia, è possibile modificarlo indipendentemente dall'impostazione globale. Come task del ciclo del bus viene utilizzato il task con il tempo di ciclo più breve (impostazione: non specificato nel Impostazioni PLC). In questo task i messaggi vengono normalmente inviati sul bus.
Altri task copiano solo i dati I/O da un buffer interno che viene scambiato solo con l'hardware fisico nel task del ciclo del bus.
Frame all'inizio dell'attività
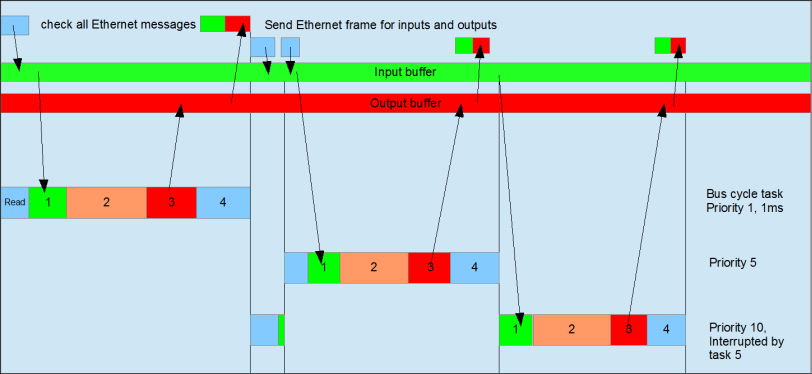
Se il FrameAtTaskStart la proprietà è impostata su FALSE, allora la tempistica è la seguente:
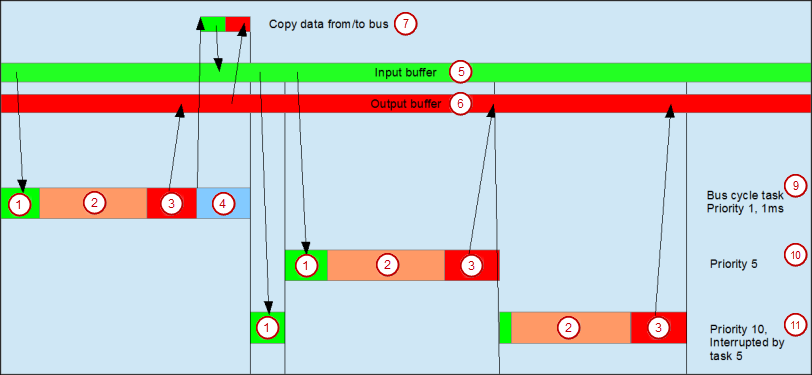
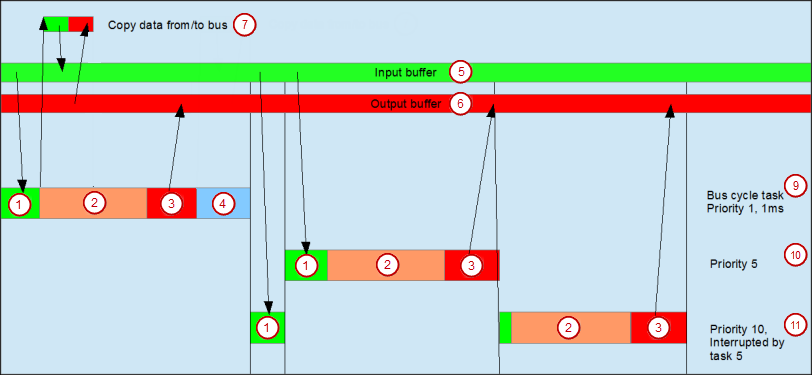
Se il FrameAtTaskStart la proprietà è impostata su TRUE, allora la tempistica è la seguente:
- Leggi gli input dal buffer di input
 Compito IEC
Compito IEC- Scrittura degli output nel buffer di output
 Ciclo di autobus
Ciclo di autobus Buffer di input
Buffer di input Buffer di uscita
Buffer di uscita Copia dati da/verso il bus
Copia dati da/verso il bus Attività del ciclo del bus, priorità 1, 1 ms
Attività del ciclo del bus, priorità 1, 1 ms Attività del ciclo del bus, priorità 5
Attività del ciclo del bus, priorità 5 Attività del ciclo del bus, priorità 10, interrotta dall'attività 5
Attività del ciclo del bus, priorità 10, interrotta dall'attività 5
Per ulteriori informazioni, vedere quanto segue: Proprietà: "IoDrvEtherCAT.FrameAtTaskStart"
Utilizzo delle attività
IL Distribuzione delle attività La scheda fornisce una panoramica dei canali I/O utilizzati, dell'attività del ciclo del bus impostata e dell'utilizzo dei canali.
Avvertimento
Se un output viene scritto in più task, lo stato non è definito, poiché può essere sovrascritto in ogni caso.
Se gli stessi input vengono utilizzati in diversi task, è possibile che l'input cambi durante l'elaborazione di un task. Ciò accade quando il task viene interrotto da un task con priorità più alta, causando una nuova lettura dell'immagine di processo.
Soluzione: all'inizio dell'attività IEC, copiare le variabili di input in variables e quindi lavorare solo con le variabili locali nel resto del codice.
Conclusione: utilizzare gli stessi input e output in più attività non ha alcun senso e in alcuni casi può portare a reazioni inaspettate.
Per ulteriori informazioni, vedere quanto segue: "Configurazione attività" capitolo
Comportamento del ciclo dell'autobus per EtherCAT
Prima che gli input IEC vengano copiati, vengono letti i messaggi di rete in sospeso dell'ultimo ciclo.
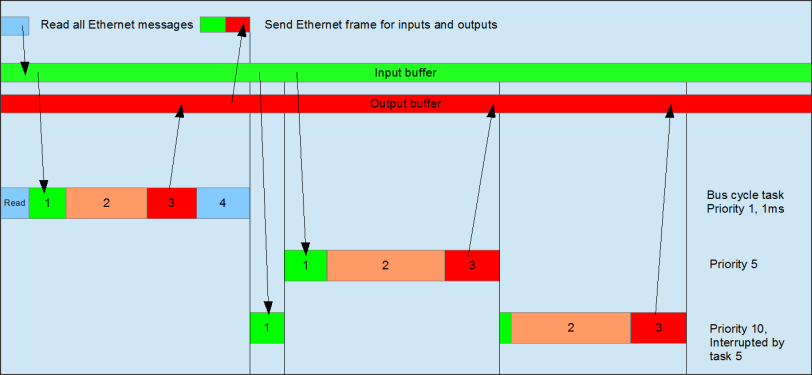
Quando il Messaggi per task l'opzione è abilitata nelle impostazioni del EtherCAT Master, vengono trasmessi telegrammi aggiuntivi ai dispositivi impiegati per ogni task e ingresso o uscita impiegati. Anche i canali utilizzati in un task lento vengono trasmessi meno frequentemente. Di conseguenza, è possibile ridurre il carico del bus.