SF_MutingPar
Astuce
La version du bloc décrite ici correspond à la dernière version du bloc dans le Liste des versions des blocs
Normes de sécurité applicables
SF_MutingPar est un composant PLCopen certifié. L'utilisateur peut trouver des informations détaillées sur les normes appliquées sous "PLCopen - Comité Technique 5 - Logiciel de Sécurité".
Important
Les exigences énumérées dans les normes doivent être respectées par l'utilisateur.
Important
Ce bloc diffère de la spécification PLCopen, voir Diagramme d'état.
Description de l'interface
Muting est la suppression délibérée de la fonction de sécurité. Dans ce bloc, l'inhibition parallèle avec quatre capteurs d'inhibition est spécifiée.
nom | Type de données | Valeur initiale | Description, valeurs des paramètres |
|---|---|---|---|
|
|
| |
|
|
| variable Signal de commutation de sortie (
|
|
|
| variable État du capteur d'inhibition 11.
Remarque : En fonction des exigences de sécurité, doit être utilisé à la place de |
|
|
| Variable. État du capteur d'inhibition 12.
Remarque : En fonction des exigences de sécurité, doit être utilisé à la place de |
|
|
| Variable. État du capteur d'inhibition 21.
Remarque : En fonction des exigences de sécurité, doit être utilisé à la place de |
|
|
| variable État du capteur d'inhibition 22.
Remarque : En fonction des exigences de sécurité, doit être utilisé à la place de |
|
|
| Variable ou constante Affiche l'état de la lampe d'inhibition.
|
|
|
| constante Temps de divergence maximum pour La note d'avertissement « DiscTime11_12, DiscTime21_22 et MaxMutingTime » doit être respectée. |
|
|
| constante Temps de divergence maximum pour La note d'avertissement « DiscTime11_12, DiscTime21_22 et MaxMutingTime » doit être respectée. |
|
|
| constante Temps maximum pour une séquence d'inhibition complète, la minuterie démarre lorsque le premier capteur d'inhibition est amorti. La note d'avertissement « DiscTime11_12, DiscTime21_22 et MaxMutingTime » doit être respectée. |
|
|
| Variable ou constante. Commande du système de contrôle qui active le démarrage de la fonction d'inhibition lorsque le cycle de la machine le demande. Après le démarrage de la fonction Muting, ce signal peut être désactivé.
|
|
|
| |
|
|
|
DiscTime11_12, DiscTime21_22 et MaxMutingTime
Pour les développeurs du niveau étendu : les entrées DiscTime11_12, DiscTime21_22 et MaxMutingTime doivent être liés à des valeurs constantes. c'est-à-dire Ces valeurs ne peuvent pas être modifiées lors des appels !
nom | Type de données | Valeur initiale | Description, valeurs des paramètres |
|---|---|---|---|
|
|
| |
|
|
| Sortie relative à la sécurité, indique l'état du dispositif de protection non isolant de l'application d'inhibition.
|
|
|
| Affiche l'état du processus de mise en sourdine.
|
|
|
| |
|
|
|
Important
Un court-circuit dans les signaux du capteur d'inhibition ou une erreur d'application fonctionnelle lors de la prise en charge de ces signaux n'est pas reconnu par ce bloc, mais est interprété comme une séquence d'inhibition incorrecte. (type de données BOOL (pas sûr), fourni par le matériel ou le logiciel utilisateur fonctionnel.) Cependant, une mise en sourdine indésirable ne devrait pas se produire. L'utilisateur doit en tenir compte dans son analyse des risques.
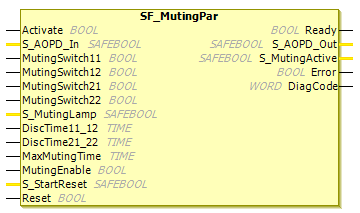
Description fonctionnelle
L'inhibition est la suppression intentionnelle d'une fonction de sécurité. Ceci est nécessaire si, par exemple, des matériaux doivent être transportés dans la zone dangereuse sans provoquer l'arrêt de la machine. L'inhibition est déclenchée par un capteur d'inhibition. L'utilisation de deux ou quatre capteurs d'inhibition et leur intégration correcte dans le processus de production doivent garantir que personne ne pénètre dans la zone dangereuse pendant que la barrière immatérielle est inhibée. Les capteurs d'inhibition peuvent être des détecteurs de proximité, des barrières photoélectroniques, des interrupteurs de fin de course, etc., qui ne doivent pas nécessairement être de sécurité. Le mode Muting actif doit être indiqué par des voyants lumineux.
Il existe des procédures de mise en sourdine séquentielles et parallèles. Ce bloc utilise l'inhibition parallèle avec quatre capteurs d'inhibition. Une implémentation du sens de transport vers l’avant est présentée ci-dessous. Le bloc peut être utilisé dans les deux sens, en avant et en arrière. L'inhibition doit être activée par le processus à l'aide du signal MutingEnable pour éviter toute manipulation.
Les paramètres d'entrée du bloc contiennent les signaux des 4 capteurs d'inhibition (MutingSwitch11, MutingSwitch12, MutingSwitch21, MutingSwitch22), le OSSD-Signal du «dispositif de protection opto-électronique actif» S_AOPD_In, ainsi que 3 temps paramétrables (DiscTime11_12, DiscTime21_22, MaxmutingTime).
Attention
Le S_StartReset-L'entrée ne doit être activée que s'il est assuré qu'aucune situation dangereuse ne peut survenir au démarrage du S-PLC.
Non. | Image | Explication |
|---|---|---|
1 | 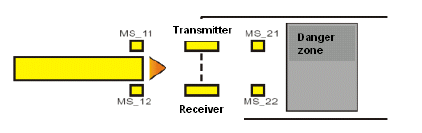 | Si les capteurs d'inhibition |
2 | 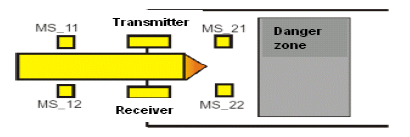 | Le mode Muting reste actif tant que |
3 | 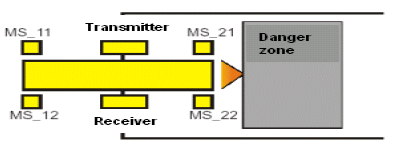 | Avant les capteurs d'inhibition |
4 | 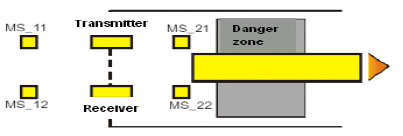 | Le mode Muting est terminé lorsque l'un ou l'autre |
Diagramme d'état
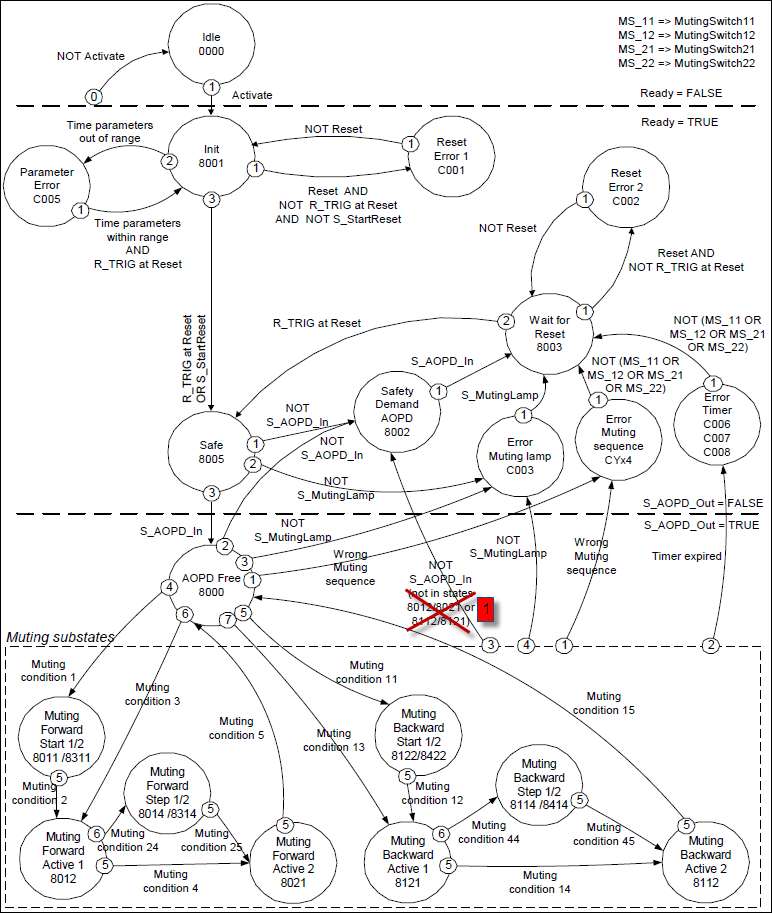
Important
 :
: NOT S_AOPD_In seulement dans les états 8011/80311 ou 8122/8422
Cela représente un écart par rapport à la spécification PLCopen.
Astuce
Remarque : la transition d'un état à l'autre Idle , conditionné par Activate = FALSE, n'est pas représenté. Dans tous les cas, ces transitions ont la plus haute priorité.
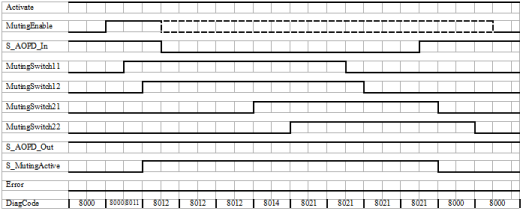
Chronogramme typique
Conditions d'inhibition
Condition d'inhibition 1 (à l'état
16#8011) (MS_11est le premier capteur d'entrée amorti) Démarrez la minuterieMaxMutingTimeetDiscTime11_12:MutingEnable AND (R_TRIG at MS_11 AND NOT MS_12 AND NOT MS_21 AND NOT MS_22)Condition d'inhibition 1 (à l'état
16#8311) (MS_12est le premier capteur d'entrée amorti) Démarrez la minuterieMaxMutingTimeetDiscTime11_12:MutingEnable AND (NOT MS_11 AND R_TRIG at MS_12 AND NOT MS_22)Condition d'inhibition 2 (de l'état
16#8011) (MS_12est le deuxième capteur d'entrée amorti). Arrêter le minuteurDiscTime11_12:MutingEnable AND (MS_11 AND R_TRIG at MS_12 AND NOT MS_21 AND NOT MS_22)Condition d'inhibition 2 (de l'état
16#8311) (MS_11est le deuxième capteur d'entrée amorti). Arrêter le minuteurDiscTime11_12:MutingEnable AND(R_TRIG at MS_11 AND MS_12 AND NOT MS_21 And NOT MS_22;Condition d'inhibition 3 (les deux capteurs d'entrée sont amortis dans le même cycle). Début du chronomètre
MaxMutingTime:MutingEnable AND (R_TRIG at MS_11 AND R_TRIG at MS_12 AND NOT MS_21 AND NOT MS_22)Condition d'inhibition 4 (tous les capteurs amortis) :
MS_11 AND MS_12 AND MS_21 AND MS_22Condition d'inhibition 24 (à
16#8014) (MS_21est le premier capteur de sortie amorti) Démarrer la minuterieDiscTime21_22:MS_11 AND MS_12 AND R_TRIG at MS_21 AND NOT MS_22Condition d'inhibition 24 (à
16#8314) (MS_22est le premier capteur de sortie amorti). Démarrer la minuterieDiscTime21_22:MS_11 AND MS_12 AND NOT MS_21 AND R_TRIG at MS_22Condition d'inhibition 25 (à partir de
16#8014) (MS_22est le deuxième capteur de sortie amorti). Arrêter le minuteurDiscTime21_22:MS_11 AND MS_12 AND MS_21 AND R_TRIG at MS_22Condition d'inhibition 25 (à partir de
16#8314) (MS_21est le deuxième capteur de sortie amorti). Arrêter le minuteurDiscTime21_22:MS_11 AND MS_12 AND R_TRIG at MS_21 AND MS_22Condition d'inhibition 5 (un des capteurs de sortie est atténué). Arrêter le minuteur
MaxMutingTime:NOT MS_11 AND NOT MS_12 AND (F_TRIG at MS_21 OR F_TRIG at MS_22)
Condition d'inhibition 11 (à
16# 8122) (MS_21est le premier capteur amorti). Démarrer le chronomètreMaxMutingTimeetDiscTime21_22:MutingEnable AND (NOT MS_22 AND R_TRIG at MS_21 AND NOT MS_11 AND NOT MS_12)Condition d'inhibition 11 (à
16# 8422) (MS_22est le premier capteur d'entrée amorti). Démarrer le chronomètreMaxMutingTimeetDiscTime21_22:MutingEnable AND (R_TRIG at MS_22 AND NOT MS_21 AND NOT MS_11 AND NOT MS_12)Condition d'inhibition 12 (à partir de
16# 8122) (MS_22est le deuxième capteur d'entrée amorti). Arrêter le minuteurDiscTime21_22:MutingEnable AND (MS_21 AND R_TRIG at MS_22 AND NOT MS_11 AND NOT MS_12)Condition d'inhibition 12 (à partir de
16#8422) (MS_21 est le deuxième capteur d'entrée amorti). Arrêter le minuteurDiscTime21_22:MutingEnable AND (R_TRIG at MS_21 AND MS_22 AND NOT MS_11 AND NOT MS_12)Condition d'inhibition 13 (les deux capteurs d'entrée atténués dans le même cycle). Démarrer la minuterie
MaxMutingTime:MutingEnable AND (R_TRIG at MS_21 AND R_TRIG at MS_22 AND NOT MS_11 AND NOT MS_12)Condition d'inhibition 14 (tous les capteurs amortis) :
MS_11 AND MS_12 AND MS_21 AND MS_22Condition d'inhibition 44 (à
16#8114) (MS_11est le premier capteur de sortie amorti). Démarrer la minuterieDiscTime11_12:MS_21 AND MS_22 AND R_TRIG at MS_11 AND NOT MS_12Condition d'inhibition 44 (à
16#8414) (MS_12est le premier capteur de sortie amorti). Démarrer la minuterieDiscTime11_12:MS_21 AND MS_22 AND NOT MS_11 AND R_TRIG at MS_12Condition d'inhibition 45 (à partir de
16#8114) (MS_12est le deuxième capteur de sortie amorti). Arrêter le minuteurDiscTime11_12:MS_21 AND MS_22 AND MS_11 AND R_TRIG at MS_12Condition d'inhibition 45 (à partir de
16#8414) (MS_11est le deuxième capteur de sortie amorti). Arrêter le minuteurDiscTime11_12: MS_21 AND MS_22 AND R_TRIG at MS_11 AND MS_12Condition d'inhibition 15 (un des deux capteurs de sortie amorti) Stop Timer
MaxMutingTime:NOT MS_21 AND NOT MS_22 AND (F_TRIG at MS_11 OR F_TRIG at MS_12)
État
16#8000:(MutingEnable = FALSE when muting sequence starts) OR((MS_11 OR MS_12) AND (MS_21 OR MS_22))OR(R_TRIG at MS_11 AND MS_12 AND NOT R_TRIG at MS_12) OR(R_TRIG at MS_12 AND MS_11 AND NOT R_TRIG at MS_11) OR(R_TRIG at MS_21 AND MS_22 AND NOT R_TRIG at MS_22) OR(R_TRIG at MS_22 AND MS_21 AND NOT R_TRIG at MS_21) OR((MS_11 AND NOT R_TRIG at MS_11) AND (MS_12 AND NOT R_TRIG at MS_12)) OR((MS_21 AND NOT R_TRIG at MS_21) AND (MS_22 AND NOT R_TRIG at MS_22))statut
16#8011:NOT MutingEnable OR NOT MS_11 OR MS_21 OR MS_22statut
16#8311:NOT MutingEnable OR NOT MS_12 OR MS_21 OR MS_22statut
16#8012:NOT MS_11 OR NOT MS_12statut
16#8021:R_TRIG at MS_11 OR R_TRIG at MS_12 OR R_TRIG at MS_21 OR R_TRIG at MS_22statut
16#8014:NOT MS_11 OR NOT MS_12 OR NOT MS_21statut
16#8314:NOT MS_11 OR NOT MS_12 OR NOT MS_22statut
16#8122:NOT MutingEnable OR MS_11 OR MS_12 OR NOT MS_21statut
16#8422:NOT MutingEnable OR MS_11 OR MS_12 OR NOT MS_22statut
16#8121:NOT MS_21 OR NOT MS_22statut
16#8112:R_TRIGat MS_11 OR R_TRIG at MS_12 OR R_TRIG at MS_21 OR R_TRIG at MS_22statut
16#8114:NOT MS_21 OR NOT MS_22 OR NOT MS_11statut
16#8414:NOT MS_21 OR NOT MS_22 OR NOT MS_12
Détection d'erreur
DiscTime11_23etDiscTime21_22ont été définis sur des valeurs inférieures àT#0sou supérieur àT#4sensemble.MaxMutingTimea été fixé à une valeur inférieure àT#0sou supérieur àT#10minensemble.Le temps de divergence pour les paires de capteurs
MutingSwitch11/MutingSwitch12ouMutingSwitch21/MutingSwitch22a été dépassé.La fonction de sourdine (
S_MutingActive =TRUE) dépasse le temps d'inhibition maximumMaxMutingTime.Les capteurs d'inhibition
MutingSwitch11,MutingSwitch12,MutingSwitch21etMutingSwitch22ont été activés dans le mauvais ordre.La séquence d'inhibition démarre sans activation
MutingEnableUne lampe d'inhibition défectueuse est allumée
S_MutingLamp = FALSEaffichéUne condition de réinitialisation statique devient un état
8001et8003découvert.
Comportement d'erreur
En cas d'événement d'erreur, les sorties S_AOPD_Out et S_MutingActive sur FALSE ensemble. La sortie DiagCode affiche le code d'erreur correspondant et la sortie Error va ouvrir TRUE ensemble.
Un redémarrage est empêché jusqu'à ce que les conditions d'erreur soient clarifiées et que l'état de sécurité soit confirmé par l'opérateur par une réinitialisation.
Codes d'erreur et d'état spécifiques au bloc
| Nom du statut | Description de l'état et réglage de la sortie |
|---|---|---|
|
| Condition de réinitialisation statique découverte après l'activation du bloc dans l'état
|
|
| Condition de réinitialisation statique détectée dans l'état
|
|
| Erreur détectée dans la lampe d'inhibition
|
|
| Erreur dans la séquence d'inhibition dans l'état
Y = état dans la séquence (6 états pour la marche avant et 6 états pour la marche arrière).
x = état du capteur lorsqu'une erreur survient (4 bits : |
|
|
|
|
| Erreur de synchronisation : temps d'inhibition actif (si
|
|
| Erreur de synchronisation : temps de divergence pour la commutation
|
|
| Erreur de synchronisation : temps de divergence pour la commutation
|
| Nom du statut | Description de l'état et réglage de la sortie |
|---|---|---|
|
| Le bloc n'est pas actif (état de base)
|
|
| Muting non actif et aucune exigence de sécurité
|
|
| Le blocage a été activé
|
|
| L'exigence de sécurité a été satisfaite par
|
|
| Des exigences de sécurité ou des erreurs ont été découvertes et ont maintenant été résolues. Confirmation de l'opérateur avec réinitialisation demandée.
|
|
| Fonction de sécurité activée
|
|
| La séquence d'inhibition avant est dans la phase de démarrage après le front de déclenchement montant de
|
|
| La séquence d'inhibition avant s'effectue après le front de déclenchement montant de
|
|
| La séquence de transfert d'inhibition est active soit :
ou
Surveillance de
|
|
| La séquence de transfert d'inhibition est active.
|
|
| La séquence de transfert d'inhibition est active.
|
|
| La séquence de mise en sourdine vers l'avant est toujours active. Les deux
|
|
| La séquence inverse d'inhibition est dans la phase de démarrage après le front de déclenchement montant de
|
|
| La séquence inverse d'inhibition est dans la phase de démarrage après le front de déclenchement montant de
|
|
| La séquence inverse d'inhibition est active soit :
ou
Surveillance de
|
|
| La séquence inverse d'inhibition est active.
|
|
| La séquence inverse d'inhibition est active.
|
|
| La séquence inverse d'inhibition est toujours active. Les deux capteurs de sortie
|