Système de contrôle redondant
Vous pouvez améliorer la fiabilité de votre système de commande en protégeant votre contrôleur actif (PLC) à l'aide d'un PLC redondant.
Le PLC redondant peut prendre en charge l'exécution de l'application à tout moment pendant l'exécution. Les rôles des automates actifs et de secours peuvent être commutés dynamiquement entre les deux contrôleurs. Cela permet d'éviter les défaillances du système ou de réduire considérablement leur impact. Les systèmes de contrôle redondants améliorent la fiabilité, la disponibilité et la continuité opérationnelle des installations industrielles critiques ou même des machines plus petites.
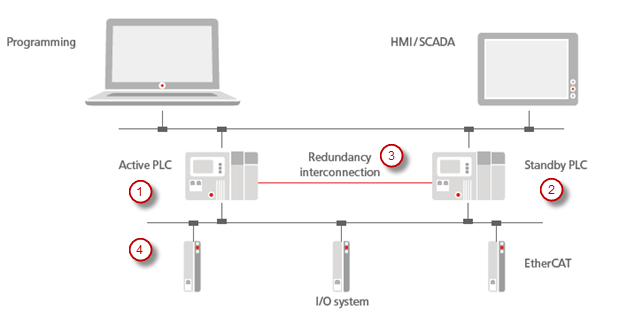
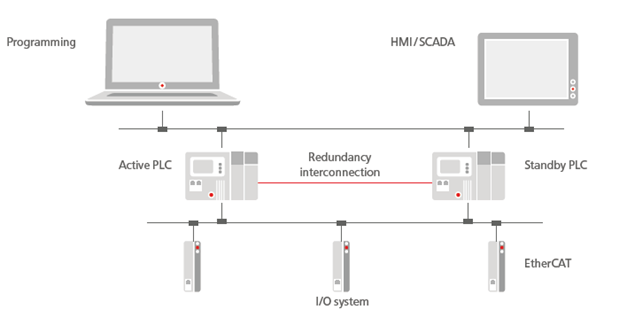
La figure montre un scénario d'automatisation comprenant l'environnement de développement, le système de contrôle redondant de deux automates programmables et un environnement machine connecté via des bus de terrain. L'application s'exécute en parallèle sur deux automates programmables : un automate fonctionne activement (1), tandis que l'autre est en mode veille (2). L'automate en mode veille lit également les entrées du système de bus de terrain connecté (EtherCAT dans l'exemple) et se synchronise en continu avec l'automate actif via la liaison de redondance (3). Cela permet au PLC de secours de devenir actif immédiatement en cas de dysfonctionnement et de prendre le contrôle des bus de terrain (4) sans aucune interruption
Le lien de redondance (3) utilise TCP ou UDP par défaut. Cependant, la communication peut également être fournie via un composant de communication spécifique au fabricant sur demande
En outre, les visualisations peuvent être connectées à un système de contrôle redondant lorsqu'elles sont exécutées en tant que CODESYS WebVisu dans un navigateur. Les clients de visualisation continueront de fonctionner quasiment sans interruption en cas de basculement.
Avis

La vidéo a pour but de vous donner un aperçu général de cette fonctionnalité. L'éventail des fonctions de CODESYS Redundancy Configuration comme on peut le voir, il peut y avoir des différences par rapport à la gamme actuelle de fonctions.

Principes de base de la fonctionnalité
Le développeur de l'application télécharge d'abord l'application sur le premier automate et y crée l'application de démarrage. Au démarrage, le second automate se synchronise avec ce contrôleur et prend également en charge l'
Une fois l'application de démarrage téléchargée et initialisée, l'automate est prêt à exécuter le premier cycle de tâches. Ensuite, toutes les zones de mémoire enregistrées (toutes les données IEC) sont transférées vers le second automate. À partir de ce moment, la redondance est active et les deux automates exécutent la tâche de l'application de manière synchrone. L'exécution des tâches est synchronisée via des messages qui sont échangés via la liaison redondante avant et après chaque tâche IEC
n'existe pas de PLC actif fixe ou préféré. Le mode de fonctionnement est déterminé par la séquence de démarrage : l'automate qui démarre en premier envoie un message à l'autre automate via la liaison de redondance. Si aucune réponse n'est reçue, l'automate démarré charge toujours l'application de démarrage et fonctionne en mode autonome
Si l'automate de secours ne reçoit aucun message de l'automate actif dans le délai configuré, il supposera que l'automate actif a mal fonctionné et il passera en mode autonome. Il prendra le contrôle des E/S du bus de terrain. Inversement, l'API actif passe également en mode autonome si aucun message n'est reçu de l'API de secours.
Si le premier automate est remplacé et redémarré, il se synchronise avec l'autre API actuellement en mode autonome comme décrit ci-dessus et passe donc en mode veille.
Un automate de secours peut passer en mode simulation. La fonctionnalité de redondance est désactivée pendant cette période. La connexion au bus de terrain reste également désactivée (comme en mode veille). L'automate actif passe en mode autonome pendant cette période. Vous pouvez mettre fin au mode simulation en le resynchronisant ou en le redémarrant. Le contrôleur fonctionnant en mode simulation revient ensuite en mode veille, à condition qu'aucune erreur ne se produise lors de la synchronisation ou du redémarrage.
Si des erreurs se produisent lors de la mise à jour de l'application de démarrage, lors du transfert des zones de mémoire enregistrées ou pendant le cycle de redondance, l'automate passe en mode erreur. Après cela, une resynchronisation ou un redémarrage est nécessaire.
Interface utilisateur
Module complémentaire : CODESYS Redundancy Configuration
Languette: État de redondance
Au moment de l'exécution, CODESYS surveille le système de redondance et y affiche les états actuels. Vous pouvez également y accéder aux commandes de redondance les plus importantes et, par exemple, commander une commutation entre
Onglet : Paramètres de redondance
Vous pouvez configurer ici les paramètres de communication du lien de redondance et définir la tâche appropriée et un chien de garde.
Onglet : Général
Onglet : Visualisation
Vous pouvez configurer ici un lien de redondance entre les serveurs Web qui fonctionnent chacun sur un automate programmable. Par conséquent, vous pouvez connecter des visualisations, qui sont exécutées CODESYS WebVisu dans un navigateur, avec le système de contrôle redondant.
Languette: Zones enregistrées
Vous pouvez gérer ici les données et les zones qui doivent être synchronisées au moment de l'exécution.
Languette: Enregistrer
Répertorie les événements de redondance historiques du logger de l'automate
EtherCAT (CODESYS GmbH Empiler)
PROFINET
Ouverture du CAN
Vous configurez votre bus de terrain dans Configuration de redondance objet sur le Général onglet du Paramètres de redondance onglet.
Pour plus d'informations, consultez : Général
Bibliothèque : Redundancy
Le Redundancy Implementation bibliothèque, qui est incluse par Redundancy bibliothèque, fournit des POU tels que SwitchToActive ou SwitchToStandby afin que vous puissiez accéder par programmation aux composants de redondance. Par exemple, vous pouvez utiliser SwitchToActive pour programmer la commutation des automates en mode actif.
Bibliothèque : VisuRedundancy
Le VisuRedundancy La bibliothèque implémente le lien de redondance pour la visualisation et fournit des blocs fonctionnels, par exemple pour surveiller les activités.
Système d'exécution
Installation
Le système d'exécution fournit deux composants principaux pour le fonctionnement redondant d'un système de commande :
Afin de faire fonctionner un système de contrôle de manière redondante, le
CmpRedundancycomposant de redondance ainsi qu'un composant supplémentaire, qui exploite le lien de redondance, sont disponibles dans le système d'exécution des automates. Ce composant supplémentaire est spécifique à l'appareil, mais une liaison IP est habituelle :CmpRedundancyConnectionIP.Ce composant gère toutes les fonctions de gestion des opérations de redondance, notamment la distribution des rôles (actif/en veille), la synchronisation des données et la surveillance des états de communication.
Composant pour le lien de redondance
Ce composant est spécifique à l'appareil et établit la connexion physique et logique entre les deux contrôleurs. La plupart des appareils utilisent une connexion IP, fournie via
CmpRedundancyConnectionIPcomposant.
Fonctionnalité
Relie deux automates à un système redondant
Synchronise les données de redondance
Commutation des états de fonctionnement des automates
Enregistre les événements de redondance dans le logger
Note
Les événements qui se produisent au moment de l'exécution sont enregistrés sur les deux appareils par les enregistreurs des systèmes d'exécution.
Le fichier de configuration *.cfg pour le temps d'exécution d'un CODESYS Control Win est stocké dans ProgramData.
[CmpRedundancyConnectionIP] Link1.IpAddressLocal=192.168.56.1 ; IP address of redundancy link of local PLC Link1.IpAddressPeer=192.168.56.101 ; IP address of redundancy link of peer PLC Link1.Port=1205 [CmpRedundancy] BootupWaitTime=5000 TcpWaitTime=2000 StandbyWaitTime=50 ; This timeout depends on the quality of real time task and communication system LockTimeout=20 ; Maximum time of timer lock Bootproject=Application ; Name of your CODESYS application RedundancyTaskName=MainTask ; Task name in your CODESYS application PlcIdent=1 ; PlcIdent=2 on other PLC
Application de démarrage
L'application de démarrage est stockée de manière identique sur les deux automates. Lorsque vous souhaitez mettre à jour l'application de démarrage, il suffit de la télécharger dans l'automate actif.
Pour effectuer une mise à jour, il suffit de charger la nouvelle application de démarrage sur le contrôleur actif. Le contrôleur de secours reçoit automatiquement la version mise à jour lors de la synchronisation.