Exemple : Fichier sur EtherCAT
Produit: CODESYS EtherCAT
Description
Cet exemple montre comment lire et écrire des SDO avec CAN over EtherCAT ainsi que le téléchargement d'un fichier de firmware avec File over EtherCAT. Il montre également comment obtenir des informations sur le maître et les esclaves, telles que le nombre d'esclaves actifs ou l'état de l'esclave. En tant que matériel, deux terminaux analogiques avec CAN sur EtherCAT sont utilisés. Les fonctions File-over-EtherCAT sont implémentées théoriquement, sans matériel.
Informations Complémentaires
Vous pouvez définir différents paramètres de démarrage pour la configuration de l'appareil. Pour les appareils qui utilisent CAN sur EtherCAT, un index et un sous-index sont utilisés pour chaque paramètre. Pour chaque paramètre, vous pouvez lire ou écrire la valeur sous forme de nombre ou de tableau d'octets avec un maximum de quatre octets.
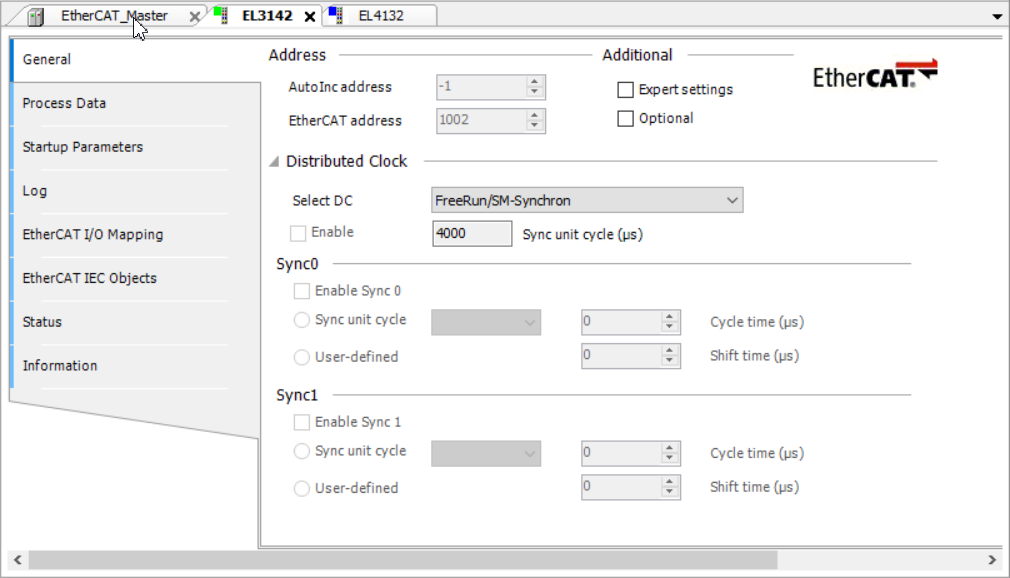 |
Les paramètres de EL4132 et EL3142 sont réglés avant le démarrage. En double-cliquant sur l'un de ces appareils, Paramètres de démarrage l'onglet s'affiche. Un paramètre de démarrage est déjà défini et vous pouvez utiliser le Nouveau bouton pour sélectionner plus de paramètres de démarrage. Le Général l'onglet affiche le EtherCAT adresse qui sera utilisée plus tard pour sélectionner l'appareil. Dans le EtherCAT_Master onglet sous le Général , vous devez définir l'adresse source correcte à laquelle l'appareil est connecté.
 |
CoE : Premièrement, le programme doit attendre que le EtherCAT Maître est prêt. Après cela, le paramètre déjà défini est lu à partir de l'appareil 1002 dans un tableau d'octets et comme DWORD. De plus, un paramètre de quatre octets est écrit et lu par la suite. Un paramètre supérieur à quatre octets est également écrit dans cet exemple.
Jusqu'à présent, seules les valeurs des paramètres sont utilisées, mais vous pouvez également lire l'entrée complète dans un tableau d'octets. Ces valeurs sont spécifiques à l'appareil. Tous les blocs fonctionnels contiennent un udiSdoAbort variable. Si une opération est annulée, cette variable renvoie un code d'abandon. L'erreur pour ce code peut être trouvée dans la spécification CANopen.
FoE : Cette fonction montre comment utiliser File over EtherCAT pour télécharger un firmware fictif. Après le EtherCAT Le maître est prêt, la mémoire pour le firmware complet sera allouée. Ensuite, l'esclave spécifique est défini sur le mode de démarrage pour télécharger le micrologiciel. Une fois le téléchargement terminé, la mémoire sera libérée.
La fonction de téléchargement n'a aucune relation directe avec l'exemple de micrologiciel. C'est juste pour montrer comment l'instance est appelée.
Configuration système requise et restrictions
Système de programmation | CODESYS Development System (version 3.5.14.0 ou supérieure) |
Système d'exécution | CODESYS Control Win (version 3.5.14.0) |
Composants complémentaires | - |
Avis
 TÉLÉCHARGER Projet
TÉLÉCHARGER Projet