Exemple : Servodriver sur EtherCAT
Produit: CODESYS EtherCAT
Description
Cet exemple montre comment lire et écrire des IDN avec ServoDrive sur EtherCAT. En tant que matériel, un Rexroth IndraDrive est utilisé. Vous pouvez également échanger l'appareil avec un autre appareil qui utilise ServoDrive sur EtherCAT.
Informations Complémentaires
Vous pouvez définir plusieurs paramètres de démarrage dans la configuration de l'appareil. Ces paramètres sont appelés IDN pour les appareils utilisant ServoDrive sur EtherCAT. Pour chaque IDN, vous pouvez définir le nom, l'attribut, l'unité, le minimum, le maximum et la valeur sous la forme d'un nombre ou d'un tableau d'octets avec un maximum de quatre octets.
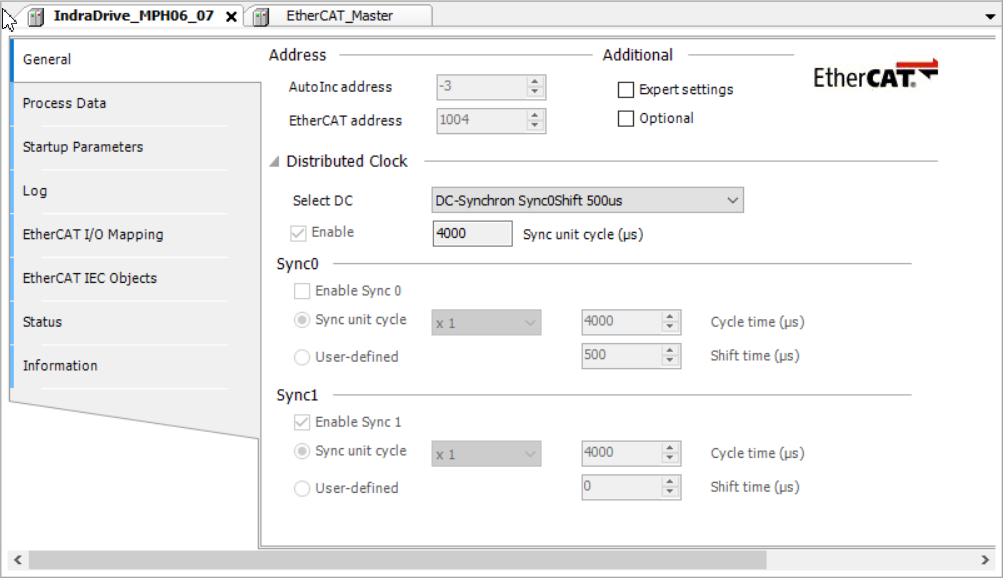 |
Deux paramètres de démarrage sont déjà définis au début. Regarde le Paramètres de démarrage onglet sur l'appareil. Le Général l'onglet affiche le EtherCAT adresse utilisée pour sélectionner l'appareil. Pour le EtherCAT_Master appareil sous le Général , vous devez définir l'adresse source correcte à laquelle l'appareil est connecté.
 |
SoE : Tout d'abord, le programme doit attendre que le EtherCAT Maître est prêt. Ensuite, le numéro IDN 32 est lu à partir de l'appareil 1001 qui était déjà défini au démarrage. De plus, un IDN est écrit sur l'appareil et ensuite relu une fois comme valeur UINT et comme tableau d'octets.
Vous pouvez lire le nom, l'attribut, l'unité, le minimum, le maximum et la valeur d'un IDN. Pour ce faire, utilisez la valeur spécifique à byElem. Le "byDrive" La valeur n'est pas définie car l'appareil utilisé n'a qu'un seul canal (= axe). L'indice du EtherCAT Maître est réglé sur usiCom et l'adresse à uiDevice. Selon l'appareil, vous devrez peut-être définir un délai d'attente suffisamment élevé.
Configuration système requise et restrictions
Système de programmation | CODESYS Development System (version 3.5.14.0 ou supérieure) |
Système d'exécution | CODESYS Control Win (version 3.5.14.0) |
Composants complémentaires | - |
Avis
 TÉLÉCHARGER Projet
TÉLÉCHARGER Projet