Tâche de cycle de bus – EtherCAT
Comportement au démarrage
En principe, les données d'entrée utilisées pour chaque tâche IEC sont lues au début de la tâche ( ) et les données de sortie sont écrites dans le pilote d'E/S à la fin de la tâche (
) et les données de sortie sont écrites dans le pilote d'E/S à la fin de la tâche ( ). L'implémentation dans le pilote d'E/S est déterminante pour le transfert supplémentaire des données d'E/S. Elle détermine le délai et l'heure de transfert effectif vers le système de bus correspondant.
). L'implémentation dans le pilote d'E/S est déterminante pour le transfert supplémentaire des données d'E/S. Elle détermine le délai et l'heure de transfert effectif vers le système de bus correspondant.
La tâche de cycle de bus de l'automate peut être définie globalement pour tous les bus de terrain dans les paramètres de l'automate. Cependant, pour certains bus de terrain, vous pouvez la modifier indépendamment du paramètre global. La tâche dont le temps de cycle est le plus court est utilisée comme tâche de cycle de bus (paramètre : indéterminé dans le Paramètres de l'API). Les messages sont normalement envoyés sur le bus dans cette tâche.
D'autres tâches copient uniquement les données d'E/S à partir d'une mémoire tampon interne qui est échangée uniquement avec le matériel physique dans la tâche de cycle de bus.
Cadre au début de la tâche
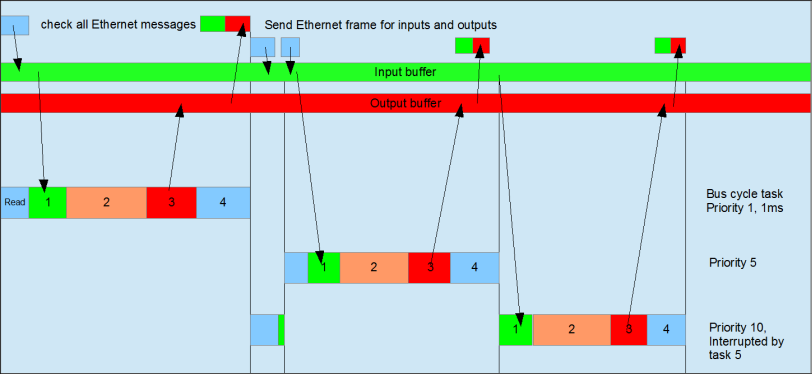
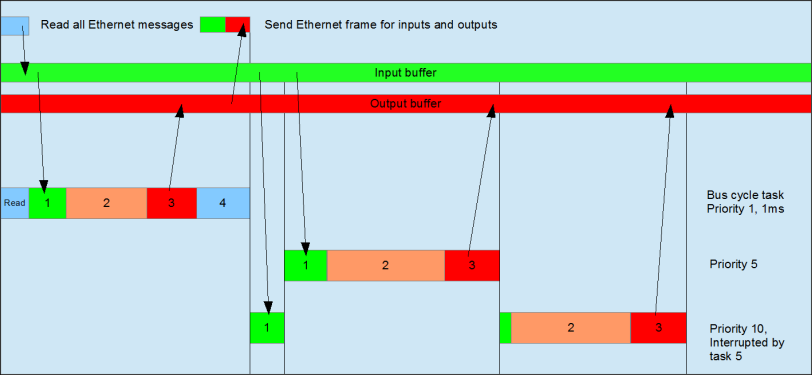
Si le FrameAtTaskStart la propriété est définie sur FALSE, alors le timing est le suivant :
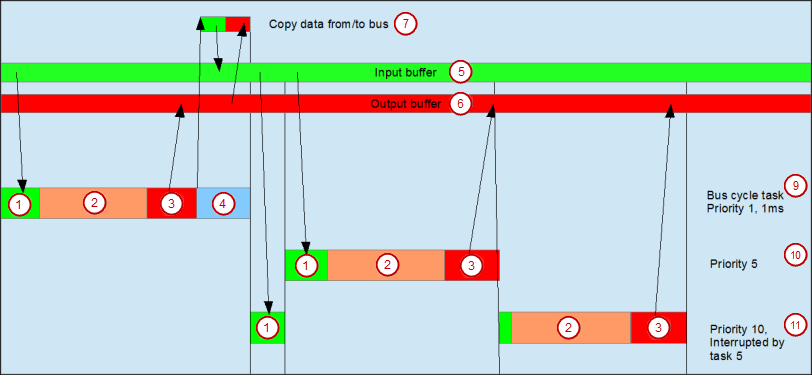
Si le FrameAtTaskStart la propriété est définie sur TRUE, alors le timing est le suivant :
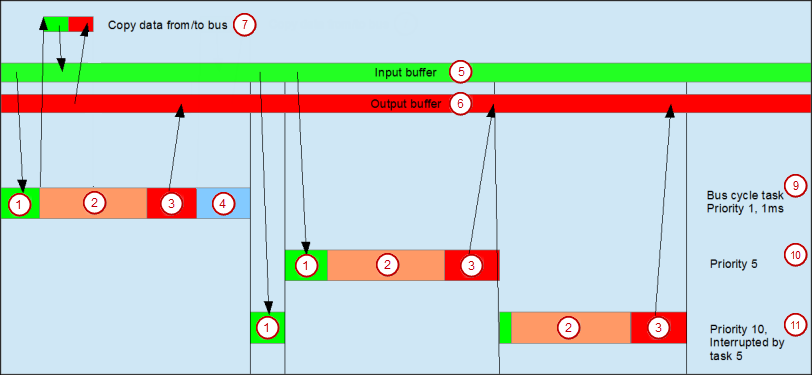
- Lire les entrées à partir du tampon d'entrée
 Tâche de la CEI
Tâche de la CEI- Écriture des sorties dans le tampon de sortie
 Vélo-bus
Vélo-bus Tampon d'entrée
Tampon d'entrée Tampon de sortie
Tampon de sortie Copier les données vers/depuis le bus
Copier les données vers/depuis le bus Tâche de cycle de bus, priorité 1, 1 ms
Tâche de cycle de bus, priorité 1, 1 ms Tâche cycle bus, priorité 5
Tâche cycle bus, priorité 5 Tâche de cycle de bus, priorité 10, interrompue par la tâche 5
Tâche de cycle de bus, priorité 10, interrompue par la tâche 5
Pour plus d'informations, consultez les éléments suivants : Propriété : "IoDrvEtherCAT.FrameAtTaskStart"
Utilisation des tâches
Le Déploiement des tâches L'onglet fournit un aperçu des canaux d'E/S utilisés, de la tâche de cycle de bus définie et de l'utilisation des canaux.
Avertissement
Si une sortie est écrite dans différentes tâches, le statut est indéfini, car il peut être écrasé dans chaque cas.
Si les mêmes entrées sont utilisées dans plusieurs tâches, il est possible qu'elles changent pendant le traitement d'une tâche. Cela se produit lorsque la tâche est interrompue par une tâche de priorité supérieure, ce qui entraîne une nouvelle lecture de l'image du processus.
Solution : au début de la tâche IEC, copiez les variables d’entrée dans les variables, puis travaillez uniquement avec les variables locales dans le reste du code.
Conclusion : Utiliser les mêmes entrées et sorties dans plusieurs tâches n’a aucun sens et peut conduire à des réactions inattendues dans certains cas.
Pour plus d'informations, consultez les éléments suivants : « Configuration des tâches » chapitre
Comportement du cycle de bus pour EtherCAT
Avant que les entrées IEC ne soient copiées, les messages réseau en attente du dernier cycle sont lus.
Quand le Messages par tâche l'option est activée dans les paramètres du EtherCAT Maître: des télégrammes supplémentaires sont transmis aux périphériques utilisés par tâche et par entrée ou sortie. Les canaux utilisés dans une tâche lente sont également transmis moins fréquemment, ce qui permet de réduire la charge du bus.