Diagnostic CANbus
Diagnostic des pannes matérielles
La plupart des problèmes de réseau CAN sont dus à un câblage incorrect ou à des périphériques CAN défectueux. Voici quelques exemples d'erreurs potentielles :
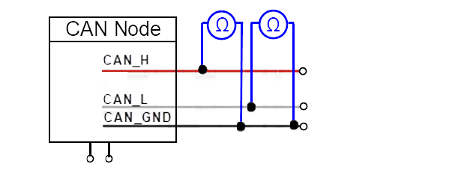
Résistances de bornes manquantes ou de dimensions incorrectes
Le bus doit être terminé précisément par une résistance de 120 Ω à son extrémité et à son début.
Différents débits en baud
Tous les abonnés doivent utiliser le même débit binaire.
Court-circuit entre CANLow, CANHigh, CANGround et V+
CAN Low et CAN High sont interchangeables
Différentes longueurs de CANHigh et CANLow
Les câbles CANHigh et CANLow ne sont pas torsadés. Par conséquent, les signaux peuvent être plus facilement interrompus.
Différentes sources de mise à la terre pour CANGround
Mise à la terre bilatérale du câble de bus CAN
Lorsque les deux extrémités du blindage du câble CAN bus sont mises à la terre, des boucles de mise à la terre peuvent se former, ce qui peut provoquer des interruptions.
Câble de bus trop long
La longueur maximale du bus dépend du débit binaire défini (voir tableau).
Débit binaire | Longueur du câble |
|---|---|
10 kbps | 6,7 km |
20 kbps | 3,3 km |
50 kbps | 1,0 km |
125 kbps | 500 m |
250 kbps | 250 m |
500 kbps | 125 m |
1 Mbps | 25 m |
Détection des pannes matérielles
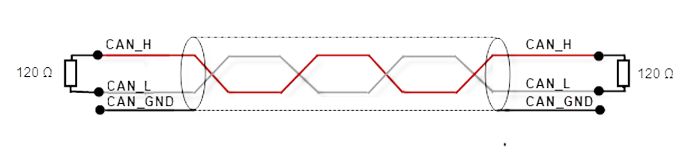
La résistance terminale sert à adapter l'impédance d'un nœud à celle du câble de transmission utilisé. En cas de désadaptation d'impédance, le signal transmis n'est pas entièrement absorbé par la charge et une partie est réfléchie dans le câble. Si les impédances de la source, du câble et de la charge sont identiques, ces réflexions sont éliminées. Ce test mesure la résistance série des câbles de la paire de données CAN et des résistances terminales connectées.
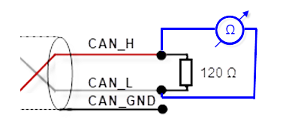
Coupez l'alimentation électrique de tous les nœuds CAN.
Mesurez la résistance entre CAN_H et CAN_L au milieu et à la fin du réseau.
La valeur mesurée doit se situer entre 50 Ω et 70 Ω. Cette valeur doit être identique en tout point du réseau.
Si la valeur est inférieure à 50 Ω, assurez-vous des points suivants :
Il n'y a pas de court-circuit entre les câbles CAN_H et CAN_L.
Il n'existe pas plus de deux résistances aux bornes.
Les nœuds ne présentent pas d'émetteurs-récepteurs défectueux.
Si la valeur est supérieure à 70 Ω, assurez-vous des points suivants :
Il n'existe aucun circuit ouvert dans le câblage des câbles CAN_H et CAN_L.
Le système de bus comporte deux résistances terminales, chacune de 120 Ω – une à chaque extrémité.
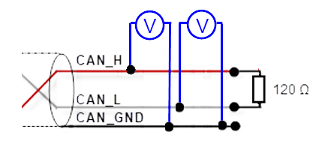
Chaque nœud contient un émetteur-récepteur CAN qui envoie des signaux différentiels. Lorsque la communication réseau est inactive, les tensions CAN_H et CAN_L sont d'environ 2,5 V. Des émetteurs-récepteurs défectueux peuvent entraîner des variations de tension en circuit ouvert et perturber la communication réseau.
Coupez l'alimentation électrique de tous les nœuds CAN.
Interrompez toute communication réseau.
Mesurez le courant continu entre CAN_H et GND.
La valeur mesurée doit se situer entre 2,0 V et 4,0 V. Si elle est inférieure à 2,0 V ou supérieure à 4,0 V, il est possible qu'un ou plusieurs nœuds aient un émetteur-récepteur défectueux.
À une tension inférieure à 2,0 V, vous devez vérifier la continuité des câbles CAN_H et CAN_L.
À une tension supérieure à 4,0 V, il convient de vérifier la présence de surtensions.
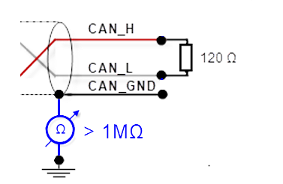
Le blindage du réseau CAN peut être mis à la terre en un seul point. Ce test permet de déterminer si le blindage est mis à la terre en plusieurs points.
Séparez le bouclier du sol.
Mesurer la résistance en courant continu entre le blindage et la terre.
Reliez le blindage à la terre.
La résistance doit être supérieure à 1 MΩ. Si elle est inférieure, il faut rechercher une mise à la terre supplémentaire du blindage.
Les émetteurs-récepteurs CAN possèdent un circuit de contrôle CAN_H et un autre circuit de contrôle CAN_L. L'expérience a montré que des dommages électriques à l'un ou aux deux circuits peuvent augmenter le courant de fuite dans ces circuits.
Utilisez un instrument de mesure de résistance pour mesurer le courant de fuite.
Isolez le nœud du réseau. Laissez le nœud hors tension.
Mesurez la résistance en courant continu entre CAN_H et CAN_GND.
Mesurez la résistance en courant continu entre CAN_L et CAN_GND.
La résistance doit normalement se situer entre 1 MΩ et 4 MΩ, voire plus. Si elle est inférieure à cette valeur, l'émetteur-récepteur CAN est probablement défectueux.
Gestion des erreurs d'un contrôleur CAN
La gestion des erreurs est intégrée au protocole CAN et est essentielle au bon fonctionnement d'un système CAN. Elle vise à détecter les erreurs dans les messages CAN afin que l'émetteur puisse renvoyer un message erroné. Chaque contrôleur CAN tente de détecter les erreurs au sein d'un message. Lorsqu'une erreur est détectée, le nœud concerné envoie un signal d'erreur, interrompant ainsi le trafic sur le bus. Les autres nœuds détectent alors l'erreur signalée (s'ils n'ont pas déjà détecté l'erreur initiale). Ils prennent ensuite les mesures appropriées et rejettent le message en cours.
Ces compteurs, ainsi que l'état du bus, fournissent souvent des indications initiales sur la cause de l'erreur lors du diagnostic des erreurs CAN. Ces informations peuvent être lues dans CODESYS par le biais de l'interface utilisateur ainsi que de l'application.