Robot articulado de 6 ejes
Transformación de un robot de brazo articulado con seis ejes rotativos y seis grados de libertad (DoF). Los tres ejes de orientación del brazo del robot se cruzan en un punto: el centro de la articulación.
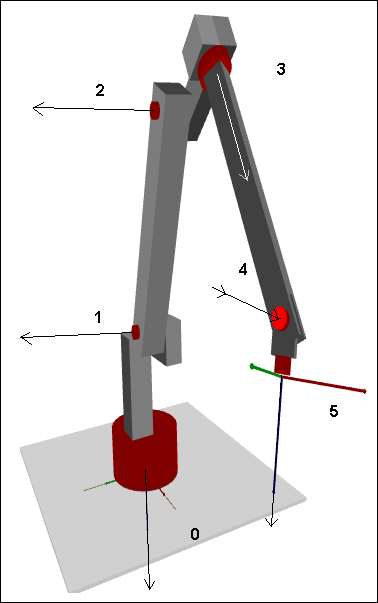
El SMC_Trafo_ArticulatedRobot_6DOF y SMC_TrafoF_ArticulatedRobot_6DOF Los bloques de funciones implementan transformaciones directas e inversas de un robot de brazo articulado con seis ejes de rotación. En la imagen, el sistema de coordenadas cartesianas está marcado debajo en el eje 0. El eje z apunta hacia abajo y el eje x apunta hacia adelante en la dirección del punto central de la herramienta (TCP). El origen del sistema de coordenadas cartesianas es el eje de intersección 0 y la parte inferior del robot.
Definición de ejes
Los ejes giratorios se identifican con flechas negras. La dirección de rotación positiva viene dada por la regla de la mano derecha. Por ejemplo, cuando el eje 0 se gira en dirección positiva, el robot gira en el sentido de las agujas del reloj cuando se ve desde arriba.
Ejes 0, 1, 3 y 4:] -180 °, 180 ° [
Eje 2: [-90 °, 180 °]
Eje 5: Sin restricciones; el rango puede ser superior a 360 °.
Posición y dimensiones de inicio
La imagen de la izquierda muestra la posición de inicio de la cinemática, que es la posición en la que todos los ejes están en su posición cero. Especifique las dimensiones indicadas en la estructura de configuración SMC_TrafoConfig_ArticulatedRobot_6DOF. Los nombres y signos de los parámetros están de acuerdo con la convención Denavit-Hartenberg. La imagen de la derecha muestra el parámetro adicional Denavit-Hartenberg d3.

a1, a3, d4 y d6 tienen que ser> = 0
a2 tiene que ser> 0 (>
g_fSMC_CNC_EPS)d1 tiene que ser <= 0
Desplazamiento de articulación (sigma_i) | Desplazamiento de palanca (d_i) | Longitud de la palanca (a_i) | Rotación de la palanca (alpha_i) | |
|---|---|---|---|---|
1 | 0 ° | d1 | a_1 | -90 ° |
2 | 90 ° | 0 | a_2 | 0 ° |
3 | 0 ° | d3 | a_3 | 90 ° |
4 | 0 ° | d4 | 0 | 90 ° |
5 | 0 ° | 0 | 0 | -90 ° |
6 | 0 ° | d6 | 0 | 0 ° |
Programación
La posición del centro de la herramienta se controla con X, Y y Z. Las unidades de X, Y y Z son las mismas que se utilizan para los parámetros a_i y d_i (por ejemplo: mm). La orientación se controla en grados con A (guiñada), B (cabeceo) y C (balanceo).
Objetos de transformación
la estructura de datos SMC_TrafoConfig_ArticulatedRobot_6DOF y el SMC_Trafo_Robot Articulado_6DOF y SMC_TrafoF_Robot articulado_6DOF Los bloques de funciones están vinculados a SM3_CNC.