Cinemática del paletizador de 4 ejes
La cinemática del paletizador de 4 ejes es un tipo de robot general que se utiliza con frecuencia para tareas de paletizado. La cinemática está provista de cuatro ejes giratorios controlados (marcados en rojo) y un quinto eje giratorio mecánico (marcado en gris). El SMC_Trafo_4AxisPaletizador y SMC_TrafoF_4AxisPaletizer Las POU implementan su transformación directa e inversa.
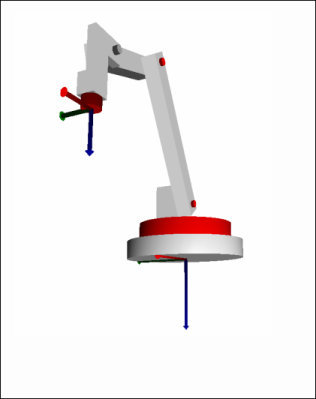
El sistema de coordenadas cartesianas es la base del paletizador. El eje Z apunta hacia abajo perpendicularmente y el eje X "hacia adelante", lo que significa en la dirección en que el brazo apunta en la dirección cero de los ejes. El origen del sistema de coordenadas cartesianas es la intersección del eje de articulación 1 y la parte inferior del robot.
Definición de ejes
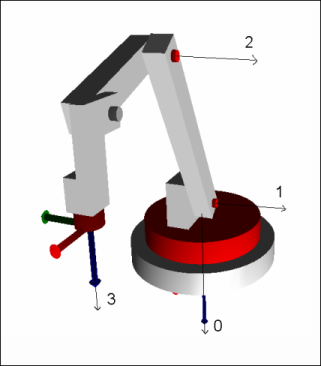
La siguiente imagen muestra la dirección de rotación de los cuatro ejes. Las flechas negras corren a lo largo del eje de la articulación. La dirección de rotación se determina de acuerdo con la regla de la mano derecha: si el pulgar de la mano derecha apunta hacia abajo a lo largo de la flecha, entonces la dirección de rotación positiva es en la dirección del dedo ligeramente curvado. Por ejemplo, cuando se ve desde arriba, la dirección de rotación positiva del eje 0 es en el sentido de las agujas del reloj, mientras que los ejes 1 y 2 se inclinan "hacia adelante" para una rotación positiva.
La cinemática tiene 4 ejes de rotación controlados (consulte los ejes a0, a1, a2, a3 coloreados en rojo) y un quinto eje de rotación mecánico (consulte el eje M de color gris).
Eje 0: ]-180°, 180°[
Eje 1: [-90°, 90°]
Eje 2: [-180°, 90[
Eje M: eje mecánico de rotación. Sin límite
Eje 3: Sin restricciones; el rango también puede ser mayor a 360°
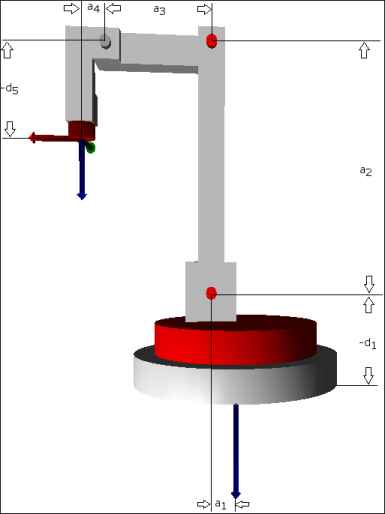
Posición cero y dimensiones
La imagen muestra la cinemática en posición cero de todos los ejes. En la posición cero, los ejes del sistema de coordenadas de la herramienta discurren paralelos a los del sistema de coordenadas de la máquina. Especifique las dimensiones indicadas en la estructura de configuración SMC_TrafoConfig_4AxisPaletizer también especificar todo a_i con signos positivos y todo d_i con signos negativos. Los nombres de los parámetros están de acuerdo con la convención Denavit-Hartenberg.
Compensación conjunta (sigma_i) | Distancia conjunta (d_i) | Longitud del elemento del brazo (a_i) | Torsión (alfa_i) | |
|---|---|---|---|---|
1 | 0° | d_1 | a_1 | 90° |
2 | -90° | 0 | a_2 | 0° |
3 | 90° | 0 | a_3 | 0° |
4 | 0° | 0 | a_4 | 90° |
5 | 0° | d_5 | 0 | 180° |
Programación en código G
La posición de la pinza se controla con X, Y y Z. La rotación de la pinza en la vertical se controla mediante el eje adicional C. Los ángulos se especifican en grados.
Objetos
la estructura de datos SMC_TrafoConfig_4AxisPalletizer y el SMC_Trafo_4AxisPalletizer y SMC_TrafoF_4AxisPalletizer los bloques de funciones están vinculados a la biblioteca SM3_Transformation. Para obtener una descripción de los parámetros, busque estos objetos en el Administrador de biblioteca.