cinemática paralela
Trípode con ejes lineales
Este sistema tiene tres accionamientos lineales que se encuentran en un ángulo definido entre sí. Los accionamientos constan de 3 raíles con carros transversales. La placa portaherramientas está unida a las correderas mediante bielas de la misma longitud. Un conjunto emparejado de bielas mantiene la placa de herramientas paralela al piso en la misma orientación. La cinemática puede mover la placa de la herramienta en tres dimensiones.
La transformación directa e inversa de estas cinemáticas se calcula en el SMC_Trafo_Tripod_Lin y SMC_TrafoF_Tripod_Lin POU. El ángulo del eje del trípode se define por el ángulo entre el riel y el eje vertical (dAxisAngle).
Requisitos mecánicos y sistema de coordenadas
Las longitudes de los 3 ejes son idénticas.
Las longitudes de las bielas son idénticas.
La distancia entre los pares de bielas entre sí es idéntica para todos los pares.
El ángulo del eje entre los rieles de accionamiento y el eje vertical es idéntico para los tres accionamientos. El margen de ángulo está entre 0° y 90°.
El eje define el movimiento del punto entre las juntas de biela en las correderas.
El sistema de coordenadas XYZ es diestro. Los vectores X e Y son horizontales y Z apunta hacia arriba. El origen se define de modo que las intersecciones de los tres ejes de movimiento con el plano XY (gráficos a continuación: puntos A) estén en un círculo en la posición [0,0,0].
Nombre | Descripción |
|---|---|
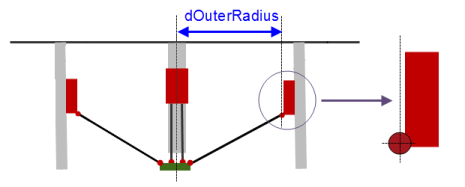
| Distancia desde el centro de la placa portaherramientas hasta los puntos de agarre de las bielas 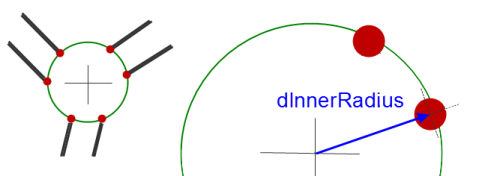 |
| 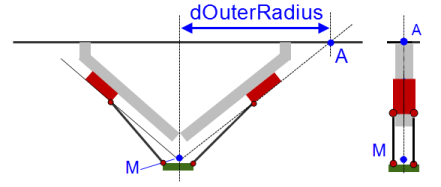 El punto A es la intersección del eje con el plano XY. |
| Longitud de las bielas |
| Distancia entre las dos bielas en un par |
| El punto A del primer eje define el eje X por defecto. El desplazamiento se utiliza para rotar toda la estructura sobre el eje Z. En este caso, el punto A ya no está en el eje X. 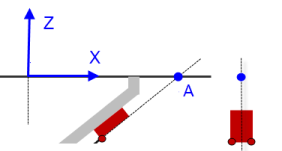 |
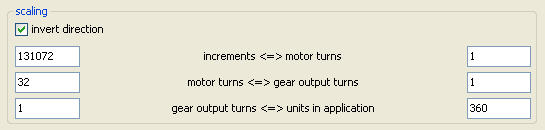
| El desplazamiento se utiliza para establecer el valor posicional del eje en su configuración predeterminada de cero. 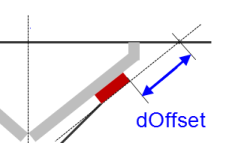 |
| |
| |
Encontrará información sobre otros parámetros en la descripción de la biblioteca. | |
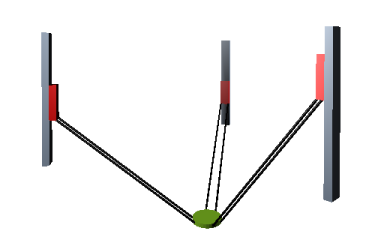
Trípode con ejes verticales
Este sistema es una variante especial del diseño cinemático descrito anteriormente y tiene los mismos requisitos mecánicos. El ángulo dAxisAngle entre los rieles guía y el eje vertical es 0° y los rieles guía son paralelos al eje vertical.
La transformación directa e inversa de estas cinemáticas se calcula en el SMC_Trafo_Tripod_Lin y SMC_TrafoF_Tripod_Lin bloques de funciones El ángulo del eje del trípode se define por el ángulo entre el riel y el eje vertical (dAxisAngle).
Nombre | Descripción |
|---|---|
| El parámetro define el radio del círculo que describen los seis puntos de sujeción de las bielas a la placa de la herramienta. 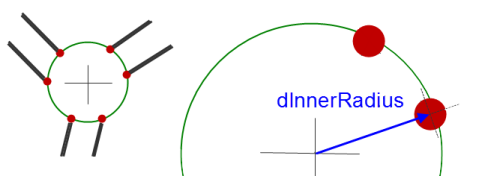 |
|  |
| Longitud de las bielas |
| Distancia de los pares de bielas entre sí |
| El punto A del primer eje define el eje X por defecto. El desplazamiento se utiliza para rotar toda la estructura sobre el eje Z. En este caso, el punto A ya no está en el eje X. 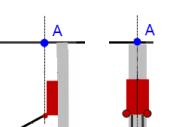 |
| El desplazamiento se utiliza para establecer el valor posicional del eje en su configuración predeterminada de cero. 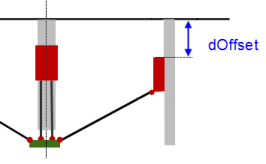 |
| |
| |
Encontrará información sobre otros parámetros en la descripción de la biblioteca. | |
Trípode con ejes giratorios
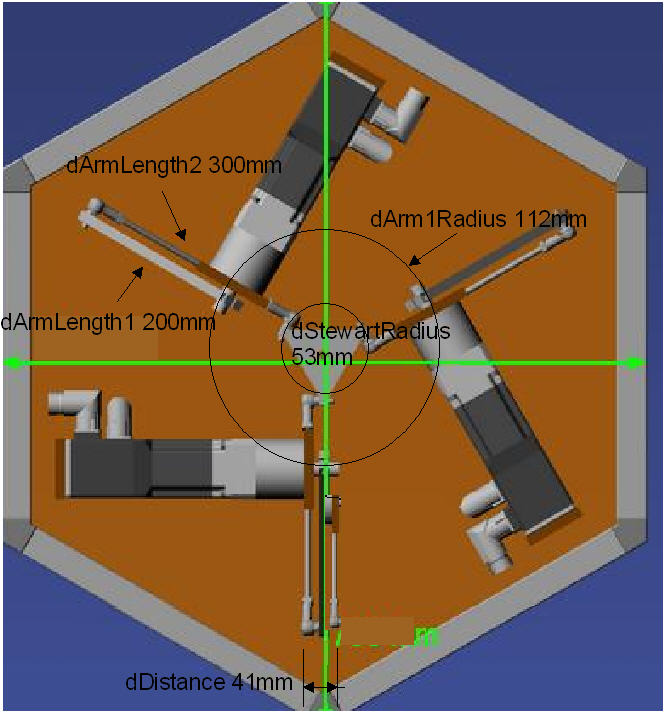
Para los trípodes, la cinemática se implementa mediante 3 accionamientos giratorios que están conectados a la placa de la herramienta mediante brazos y bielas.
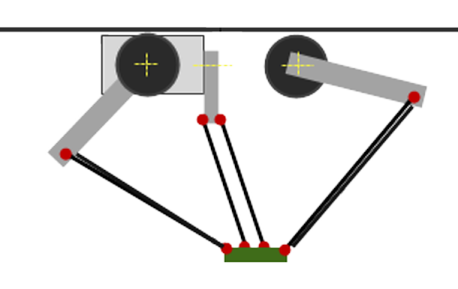
El origen del sistema de coordenadas es la ubicación del centro de la placa de la herramienta cuando los 3 brazos están en posición horizontal.
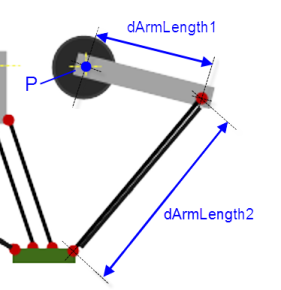
La transformación directa e inversa de estas cinemáticas se calcula en el SMC_TRAFO_Tripod_Arm y SMC_TRAFOF_Tripod_Arm bloques de funciones
Requisitos mecánicos y sistema de coordenadas
Las longitudes de los tres ejes son idénticas.
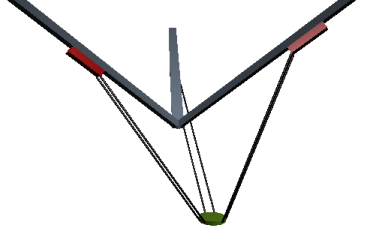
Las longitudes de las bielas son idénticas.
La distancia entre los pares de bielas entre sí es idéntica para todos los pares.
Nombre | Descripción |
|---|---|
|  |
| |
| El parámetro define el radio del círculo que establecen los 3 puntos P de los accionamientos. 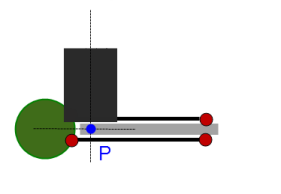 |
| El parámetro define el radio del círculo que describen los 6 puntos de agarre de las bielas a la placa de la herramienta. 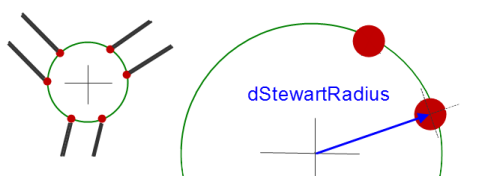 |
| Distancia entre las dos bielas en un par |
| |
| |
| |
Encontrará información sobre otros parámetros en la descripción de la biblioteca. | |
La imagen muestra la posición cero de todos los ejes. (Los tres brazos superiores son horizontales). El MCS se muestra en la placa de herramientas. Las flechas en los ejes A0, A1 y A2 muestran la dirección de rotación de los accionamientos según la regla de la mano derecha.
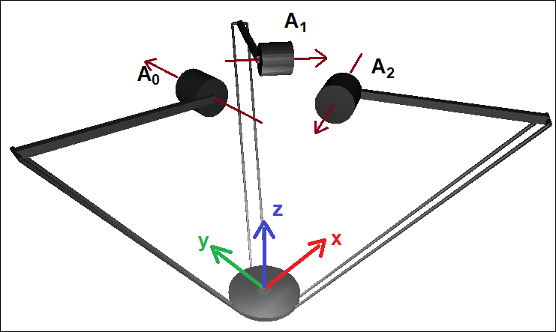
Sistema de coordenadas de máquina (MCS) | |
Origen | Se define en el punto medio de la placa de herramientas cuando los 3 brazos superiores (aquellos que están conectados directamente con A0, A1 o A2) están en posición horizontal |
X | Desde el origen, apunta lejos del primer motor (A0), paralelo al segmento del brazo superior del primer brazo |
Y | Determinado por X y Z para que el MCS sea diestro |
Z | Ortogonal a la placa de la herramienta Señala desde la placa de herramientas en la dirección de los motores |
Las respectivas transformaciones son ejecutadas por las siguientes POUs SMC_TRAFO_Tripod_Arm y SMC_TRAFOF_Tripod_Arm:
Configuraciones de transformación
tta: SMC_TRAFO_Tripod_Arm := (dArmLength1:=200, dArmLength2:=300, dArm1Radius:=112, dStewartRadius:=53,dDistance:=41,dMaxAngleBallJoint:=60); ttaf: SMC_TRAFOF_Tripod_Arm := (dArmLength1:=200, dArmLength2:=300, dArm1Radius:=112, dStewartRadius:=53,dDistance:=41);