Interrupción y continuación de movimientos
El Robotics_Interrupt_Continue.project El proyecto de ejemplo descrito aquí se encuentra en el directorio de instalación de CODESYS bajo ..\CODESYS SoftMotion\Examples.
Este ejemplo muestra cómo los movimientos ordenados se pueden interrumpir con el SMC_GroupInterrupt bloque de funciones y se reanuda más tarde con el SMC_GroupContinue bloque de funciones. El grupo de ejes puede realizar cualquier movimiento entre interrupción y continuación.
Estructura de la aplicación
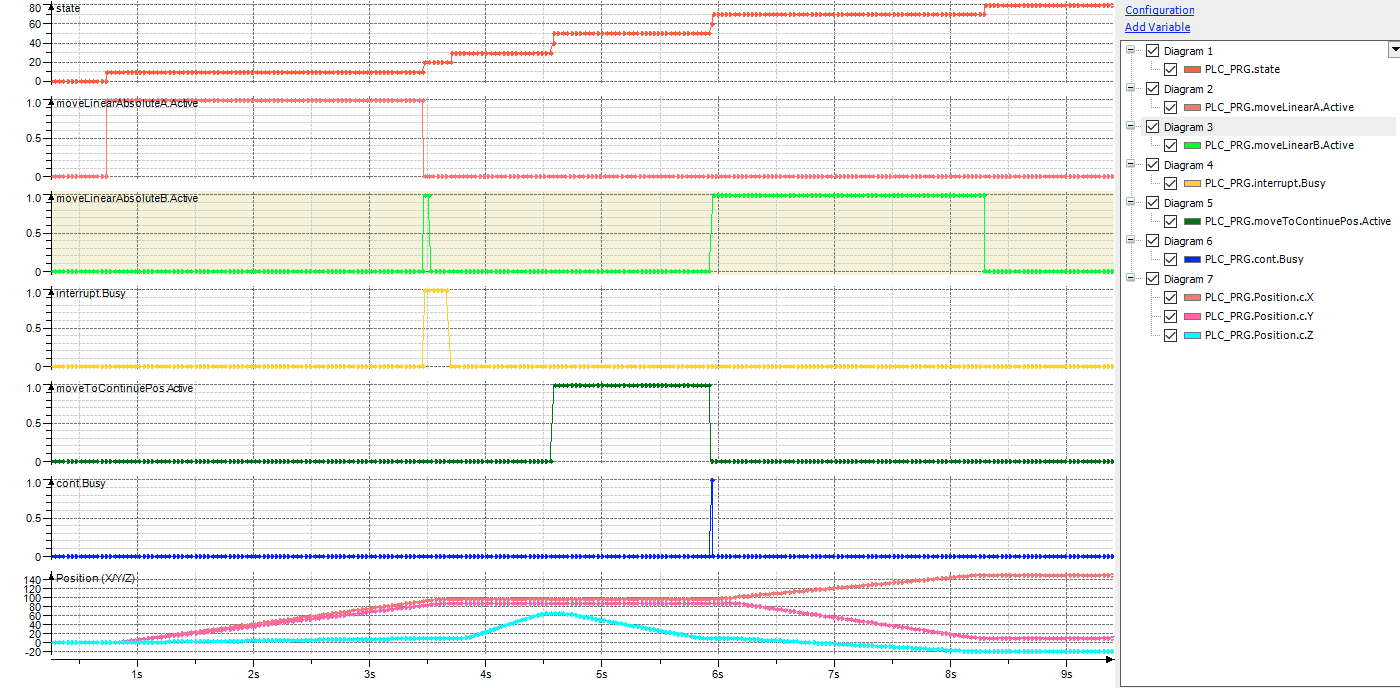
La aplicación consta de una máquina de estados simple en el PLC_PRG programa y un seguimiento para rastrear fácilmente las transiciones de estado.
Primero, se habilitan los ejes y el grupo de ejes. (
STATE_POWER_ON)Luego, dos movimientos,
moveLinearAymoveLinearB, se ordenan con la combinación. (STATE_START_MOVING)Tan pronto como el segundo movimiento está activo (cuando comienza la mezcla), el movimiento se interrumpe. La causa podría ser, por ejemplo, que se haya detectado un defecto en la herramienta.
(STATE_INTERRUPT)Se realiza un movimiento PTP relativo en dirección Z positiva, por ejemplo, para sustituir la herramienta después del defecto.
(STATE_INTERMEDIATE_MOVEMENT)Antes de reanudar, el sistema vuelve a la posición donde se interrumpió el movimiento original. (
STATE_GET_CONTINUE_POS/STATE_MOVE_TO_CONTINUE_POS)Se retoma el movimiento original.
(STATE_CONTINUE)
Uso
Compile el programa creado e inicie sesión. Para realizar un seguimiento de los diferentes estados, puede descargar el seguimiento al controlador. Inicie la aplicación.