Correr un robot
Ver el Robotics_Jogging.project proyecto de ejemplo en el directorio de instalación de CODESYS por debajo ..\CODESYS SoftMotion\Examples.
Este ejemplo demuestra cómo desplazar un grupo de ejes con el SMC_GroupJog2 POU.
Se recomienda instalar el CODESYS Depictor para este ejemplo (la versión de demostración gratuita es suficiente). Alternativamente, también puede eliminar las partes de código correspondientes del ejemplo para usar el ejemplo sin Depictor.
Solicitud
Para demostrar el caso más general posible, el ejemplo tiene las siguientes funciones:
Utilización de un robot con singularidades (robot articulado de 6 ejes). El ejemplo muestra que puede mover el robot a través de singularidades en ACS y luego continuar trotando de forma cartesiana en una configuración diferente.
Desplazamiento y rotación del sistema de coordenadas de máquina (MCS) del robot con respecto al sistema de coordenadas mundial (WCS). De esta forma, puede ver cómo se diferencia el jogging en MCS y WCS.
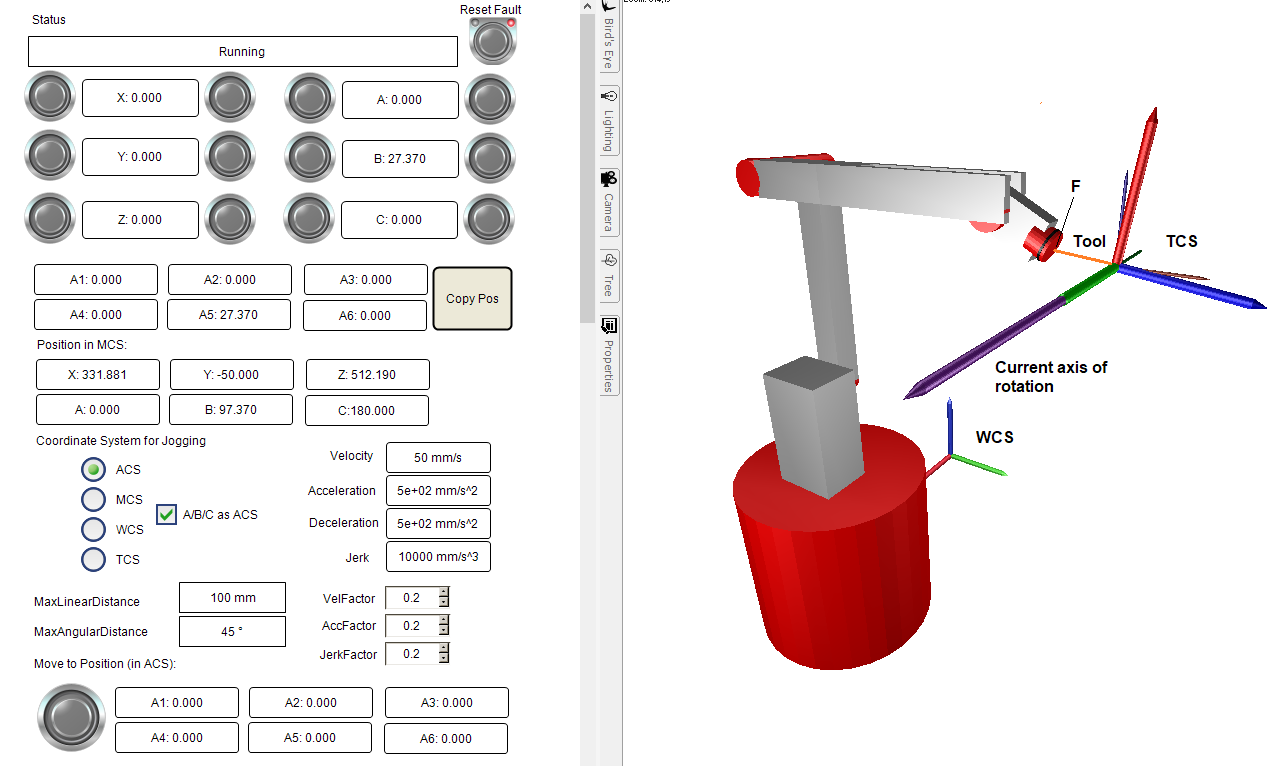
Configuración de una herramienta desplazada y girada con respecto a la brida (F). En la siguiente figura, puede ver la herramienta y el desplazamiento y rotación del TCS con respecto a la brida (F).
Un eje lineal adicional
Add0y un eje giratorio adicionalAdd1.
Estructura de la aplicación
Programa principal
el programa principal
PLC_PRGconsiste en una máquina de estado, queActiva el grupo de ejes (estado 0)
Configura la herramienta (estado 5)
Configura el MCS (estado 6)
Inicia el trote (estado 10)
En el estado 20, se manejan los errores de avance y se aceptan los comandos de movimiento (Mover a la posición cambiar en la visualización).
Los otros estados se utilizan para realizar el movimiento (60, 70) y para manejar y reconocer errores (900, 1000).
Según la máquina de estados, todas las POU robóticas y el
GroupJog2El programa se llama cíclicamente y se realizan algunos cálculos para la visualización 3D en Depictor.
Programa Group Jog2
Este programa contiene una máquina de estado con los siguientes pasos:
En el estado 10 se establecen las entradas de SMC_GroupJog2 y se lee la configuración de los ejes del robot (SMC_GroupReadActualPosition). Esta configuración se realiza en el estado 20 en el grupo de ejes (SMC_SetKinConfiguration).
En el estado 30, el sistema reacciona a los errores durante el avance, así como a los cambios en la configuración del avance (por ejemplo, a un sistema de coordenadas modificado). Si hay un cambio, el sistema vuelve al estado 10.
El estado 50 se ingresa en un flanco descendente de la entrada Habilitar. MC_GroupHalt detiene el avance.
Puesta en marcha
Compile e inicie el programa creado. Puede utilizar la visualización para ejecutar el robot. Puede definir todos los ajustes relevantes para el avance (por ejemplo, en qué sistema de coordenadas se realiza el avance ya qué velocidad).
Si ha instalado el CODESYS Depictor, entonces se recomienda colocar la ventana con el Depictor (Scene POU) junto a la ventana de visualización.
El Depictor representa el TCS (Sistema de coordenadas de herramientas) en la parte delantera del robot. Además, el eje de rotación actual del TCS se muestra en púrpura. Esto es útil para comprobar los diferentes tipos de cambio de orientación (por ejemplo, probar el ABC_as_ACS opción y la TCS sistema coordinado).