Amortiguación y combinación de movimientos
Los comandos de movimiento se pueden almacenar en búfer con CODESYS SoftMotion. Para cada movimiento ordenado, se puede especificar cómo se amortigua el movimiento y cómo se debe realizar la combinación del movimiento anterior con el nuevo movimiento. La ruta ordenada se ajusta redondeando las esquinas para poder recorrerla
Si un movimiento está amortiguado o no y cómo se realiza, se puede configurar mediante el BufferMode entrada del bloque de movimiento (por ejemplo, MC_MoveDirectAbsolute o MC_MoveCircularRelative). Para obtener más información, consulte lo siguiente: MC_Buffer_Mode.
El TransitionMode y TransitionParameter las entradas determinan cómo se redondean las esquinas. Para obtener más información, consulte lo siguiente: MC_TRANSITION_MODE.
Para obtener más información sobre los movimientos, consulte lo siguiente: Bloques de funciones para movimientos
Aviso
En los modos de fusión, el TransitionMode no debe ser igual a TMNone.
Sugerencia
La combinación entre dos movimientos comienza como muy pronto a la mitad del primer movimiento y termina como muy tarde a la mitad del segundo movimiento.
Si el primer movimiento ya se ha planificado demasiado, es posible que ya no sea posible mezclar con los parámetros ajustados. Entonces el área de mezclado se reduce o ya no es posible mezclar. Para garantizar una mezcla exitosa, ambos movimientos deben realizarse en el mismo ciclo.
Dinámica de rutas al mezclar
Si la combinación se realiza entre movimientos de CP (entre segmentos lineales y circulares), debe tenerse en cuenta que la aceleración máxima de la trayectoria y la máxima sacudida de la trayectoria pueden superarse durante la combinación. Cuanto más corto sea el rango de fusión, más prominente será este efecto. Sin embargo, los límites de los ejes (la aceleración máxima del eje y la máxima sacudida del eje) siempre se mantienen
Por lo tanto, si la aceleración máxima de la trayectoria es baja y la aceleración máxima del eje es alta, pueden producirse aceleraciones demasiado altas durante la combinación. Esto se puede contrarrestar mediante el AccFactor entrada de los bloques de movimiento, por ejemplo, reduciendo la aceleración máxima del eje para un movimiento.
Características de TMStartVelocity
El cálculo de los puntos de mezcla se basa en una curva de velocidad idealizada, que puede desviarse de la curva de velocidad real. En este momento, se simula una rampa de desaceleración en la trayectoria original hacia el punto de fusión y una rampa de aceleración y alejándose del punto de fusión. Como velocidad objetivo se utiliza el mínimo de la velocidad de trayectoria programada y la velocidad de trayectoria máxima estimada resultante de los límites del eje
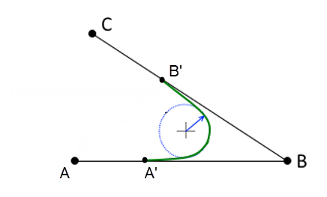
Además, al combinar líneas rectas, se tiene en cuenta el ángulo entre ellas. El radio de curvatura mínimo para el elemento de fusión es el resultado de la velocidad de trayectoria deseada y de los límites dinámicos estimados. Los puntos A' y B' se derivan sucesivamente de este radio y del ángulo entre las líneas rectas
Si los movimientos se ralentizan durante el proceso de mezcla a pesar de tener un factor establecido de 1, entonces aumentar el factor puede ayudar.
Ejemplo
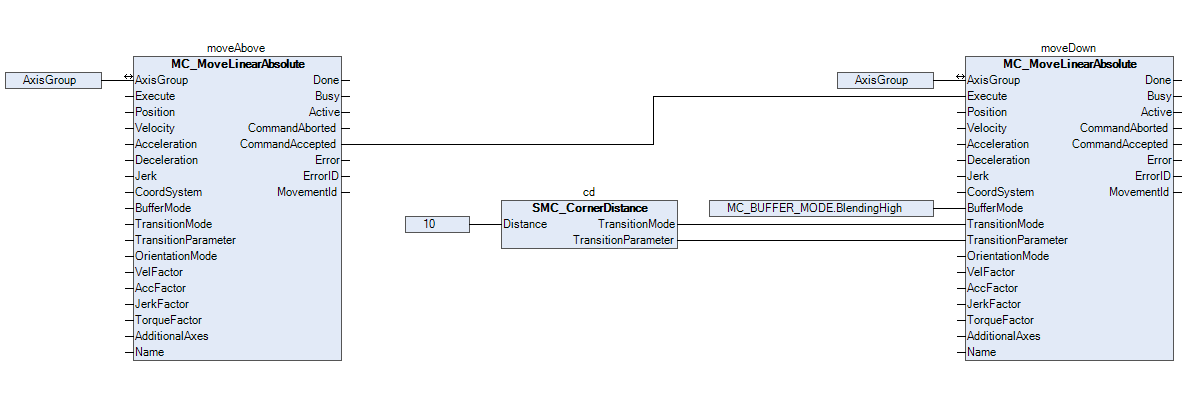
En una pequeña aplicación de ejemplo, se supone que se debe recoger una pieza de trabajo. El robot debe moverse primero por encima de la pieza de trabajo y luego hacia abajo para recogerla. Para llegar a la pieza lo más rápido posible, el recorrido entre los dos movimientos no debe detenerse, sino mezclarse. La fusión en el segundo movimiento debe comenzar diez unidades antes de llegar al final del primer movimiento
Para cumplir con los requisitos, se deben ordenar dos movimientos. El primer movimiento (moveAbove) sobre la pieza y el segundo movimiento (moveDown) hacia abajo, hacia la pieza de trabajo. Para el segundo movimiento, se debe definir cómo se debe amortiguar y mezclar el movimiento
Como se muestra en la siguiente imagen, BlendingHigh está seleccionado para BufferMode. Esto define que el movimiento debe amortiguarse después del primer movimiento y luego mezclarse. Además, para el TransitionMode, TMCornerDistance se define con una distancia de 10 unidades para combinar suavemente el primer movimiento con el segundo movimiento. Para configurar las dos entradas TransitionMode y TransitionParameter apropiadamente, el SMC_CornerDistance se usa un bloque de funciones.