Ejemplo: archivo sobre EtherCAT
Producto: CODESYS EtherCAT
Descripción
Este ejemplo muestra cómo leer y escribir SDO con CAN over EtherCAT así como descargar un archivo de firmware con File over EtherCAT. También muestra cómo obtener información sobre el maestro y los esclavos, como el número de esclavos activos o el estado del esclavo. Como hardware se utilizan dos terminales analógicos con CAN over EtherCAT. Las funciones File-over-EtherCAT se implementan teóricamente, sin hardware.
Información adicional
Puede establecer varios parámetros de inicio para la configuración del dispositivo. Para dispositivos que usan CAN sobre EtherCAT, se usa un índice y un subíndice para cada parámetro. Para cada parámetro, puede leer o escribir el valor como un número o como una matriz de bytes con un máximo de cuatro bytes.
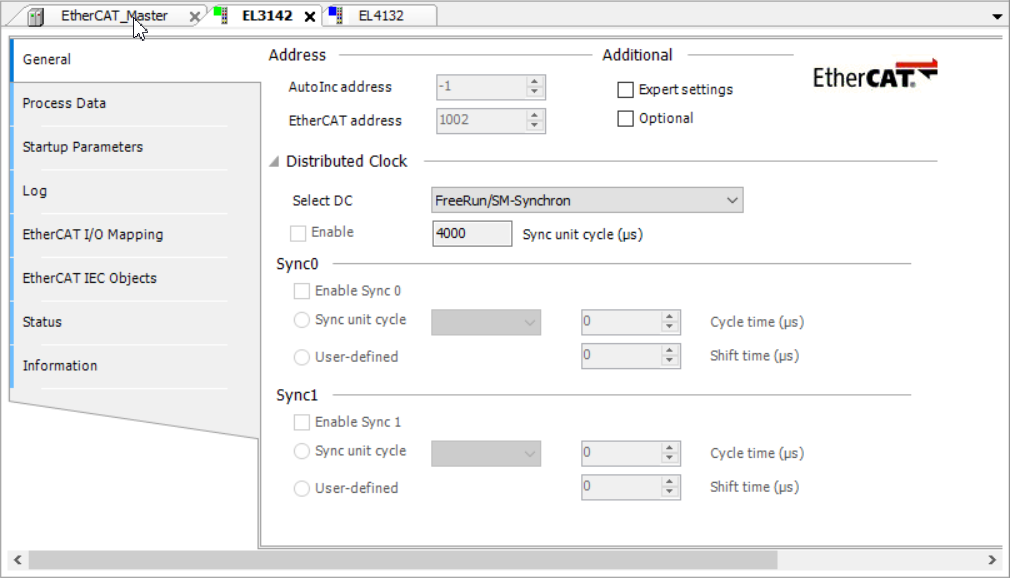 |
Los parámetros para EL4132 y EL3142 se configuran antes del inicio. Al hacer doble clic en uno de estos dispositivos, Parámetros de inicio se muestra la pestaña. Ya se ha establecido un parámetro de inicio y puede utilizar el Nuevo botón para seleccionar más parámetros de inicio. El General La pestaña muestra el EtherCAT dirección que se utiliza más adelante para seleccionar el dispositivo. En el EtherCAT_Master pestaña debajo de General pestaña, debe configurar la dirección de origen correcta donde está conectado el dispositivo.
 |
CoE: Primero, el programa tiene que esperar hasta que el EtherCAT El maestro está listo. Después de eso, el parámetro ya establecido se lee desde el dispositivo 1002 en una matriz de bytes y como DWORD. Además, se escribe y lee posteriormente un parámetro de cuatro bytes. En este ejemplo también se escribe un parámetro de más de cuatro bytes.
Hasta ahora, solo se utilizan los valores de los parámetros, pero también puede leer la entrada completa en una matriz de bytes. Estos valores son específicos del dispositivo. Todos los bloques de funciones contienen un udiSdoAbort variable. Si se cancela una operación, esta variable devuelve un código de cancelación. El error de este código se puede encontrar en la especificación CANopen.
FoE: esta función muestra cómo usar File over EtherCAT para descargar un firmware ficticio. Después de la EtherCAT El maestro está listo, se asignará memoria para el firmware completo. Luego, el esclavo específico se configura en modo de arranque para descargar el firmware. Cuando finalice la descarga, se liberará la memoria.
La función de carga no tiene relación directa con el ejemplo de firmware. Es solo para mostrar cómo se llama la instancia.
Requisitos y restricciones del sistema
Sistema de programación | CODESYS Development System (versión 3.5.14.0 o superior) |
Sistema de tiempo de ejecución | CODESYS Control Win (versión 3.5.14.0) |
Componentes adicionales | - |
Aviso
 DESCARGAR Proyecto
DESCARGAR Proyecto