Ejemplo: Servodrive over EtherCAT
Producto: CODESYS EtherCAT
Descripción
Este ejemplo muestra cómo puede leer y escribir IDN con ServoDrive sobre EtherCAT. Como hardware, se utiliza un Rexroth IndraDrive. También puede intercambiar el dispositivo por otro dispositivo que utilice EtherCAT.
Información adicional
Puede establecer varios parámetros de inicio en la configuración del dispositivo. Estos parámetros se denominan IDN para dispositivos que utilizan ServoDrive sobre EtherCAT. Para cada IDN, puede establecer el nombre, el atributo, la unidad, el mínimo, el máximo y el valor como un número o matriz de bytes con un máximo de cuatro bytes.
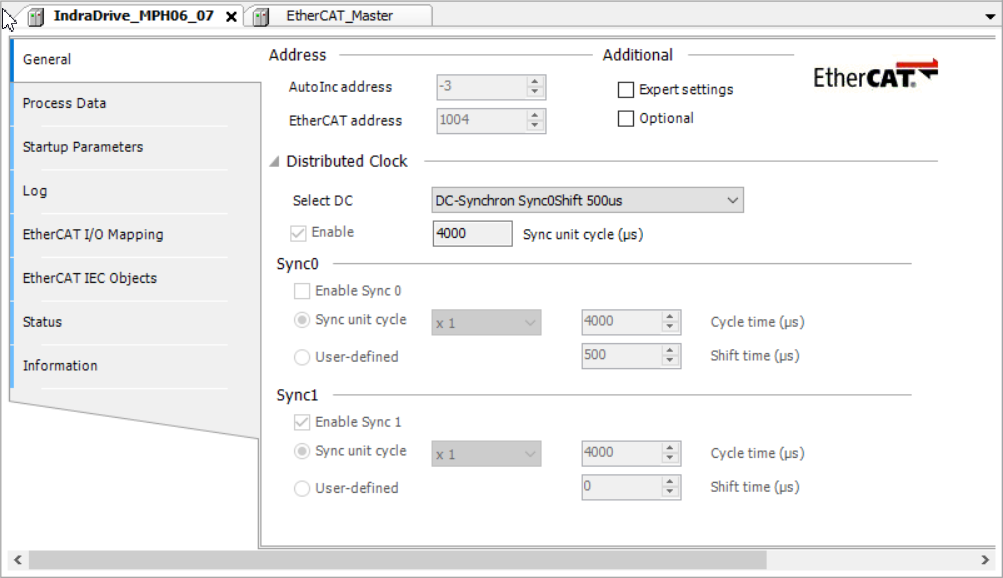 |
Dos parámetros de inicio ya están establecidos al principio. mira el Parámetros de inicio pestaña en el dispositivo. El General La pestaña muestra el EtherCAT dirección utilizada para seleccionar el dispositivo. Para el EtherCAT_Master dispositivo bajo el General pestaña, debe configurar la dirección de origen correcta donde está conectado el dispositivo.
 |
SoE: Primero, el programa tiene que esperar hasta que el EtherCAT El maestro está listo. Posteriormente, se lee el número IDN 32 del dispositivo 1001 que ya estaba configurado al inicio. Además, se escribe un IDN en el dispositivo y luego se vuelve a leer una vez como un valor UINT y como una matriz de bytes.
Puede leer el nombre, atributo, unidad, mínimo, máximo y valor de un IDN. Para hacer esto, use el valor específico en byElem. El "byDrive" El valor no se establece porque el dispositivo utilizado tiene solo un canal (= eje). El índice del EtherCAT El maestro se establece en usiCom y la dirección en uiDevice. Dependiendo del dispositivo, es posible que deba configurar el tiempo de espera lo suficientemente alto.
Requisitos y restricciones del sistema
Sistema de programación | CODESYS Development System (versión 3.5.14.0 o superior) |
Sistema de tiempo de ejecución | CODESYS Control Win (versión 3.5.14.0) |
Componentes adicionales | - |
Aviso
 DESCARGAR Proyecto
DESCARGAR Proyecto