Diagnóstico CANbus
Diagnóstico de fallos de hardware
La mayoría de los problemas de CAN se deben a un cableado incorrecto o a dispositivos CAN defectuosos. Entre los posibles errores se incluyen los siguientes:
Resistencias terminales faltantes o dimensionadas incorrectamente
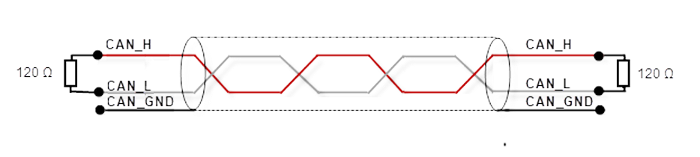
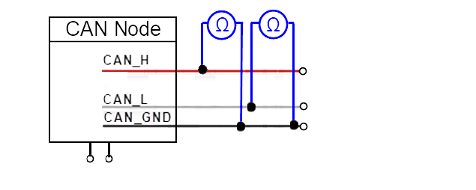
El bus debe terminarse exactamente con una resistencia terminal de 120 Ω al principio y al final.
Diferentes velocidades en baudios
Todos los suscriptores deben utilizar la misma velocidad en baudios.
Cortocircuito entre CANLow, CANHigh, CANGround, V+
CANLow y CANHigh intercambiados
Diferentes longitudes de CANHigh y CANLow
CANHigh y CANLow no son un par trenzado. Por lo tanto, las señales se interrumpen con mayor facilidad.
Diferentes fuentes de puesta a tierra para CANGround
Puesta a tierra de dos lados del cable del bus CAN
Cuando ambos extremos del blindaje del cable del bus CAN están conectados a tierra, se pueden formar bucles de tierra que pueden causar interrupciones.
El cable del autobús es demasiado largo
La longitud máxima del bus depende de la velocidad en baudios establecida (ver tabla).
Tasa de bits | Longitud del cable |
|---|---|
10 kbps | 6,7 kilómetros |
20 kbps | 3,3 kilómetros |
50 kbps | 1,0 kilómetros |
125 kbps | 500 metros |
250 kbps | 250 metros |
500 kbps | 125 metros |
1 Mbps | 25 metros |
Detección de fallos de hardware
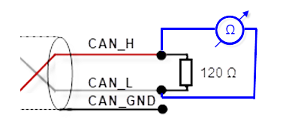
La resistencia terminal se utiliza para adaptar la impedancia de un nodo a la impedancia del cable de transmisión utilizado. Cuando existe una discrepancia en la impedancia, la señal transmitida no es absorbida completamente por la carga y parte de ella se refleja de vuelta al cable de transmisión. Si las impedancias de la fuente, el cable de transmisión y la carga son iguales, estas reflexiones se eliminan. En esta prueba, se mide la resistencia en serie de los cables del par de datos CAN y las resistencias terminales conectadas.
Apague la fuente de alimentación de todos los nodos CAN.
Mida la resistencia entre CAN_H y CAN_L en el medio y al final de la red.
El valor medido debe estar entre 50 Ω y 70 Ω. El valor debe ser el mismo en todas las ubicaciones de la red.
Si el valor es inferior a 50 Ω, asegúrese de lo siguiente:
No hay cortocircuito entre los cables CAN_H y CAN_L.
No existen más de dos resistencias terminales.
Los nodos no tienen transceptores defectuosos.
Si el valor es mayor a 70 Ω, asegúrese de lo siguiente:
No existe ningún circuito abierto en el cableado de los cables CAN_H y CAN_L.
El sistema de bus tiene dos resistencias terminales, cada una de 120 Ω, una en cada extremo.
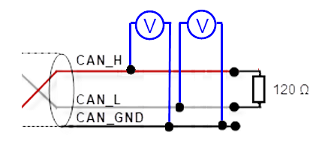
Cada nodo contiene un transceptor CAN que envía señales diferenciales. Cuando la comunicación de red está inactiva, los voltajes CAN_H y CAN_L son de aproximadamente 2,5 V. Los transceptores defectuosos pueden provocar variaciones en los voltajes de circuito abierto e interrumpir la comunicación de red.
Apague la fuente de alimentación de todos los nodos CAN.
Detener toda comunicación de red.
Mida la corriente continua entre CAN_H y GND.
El valor medido debe estar entre 2,0 V y 4,0 V. Si es menor que 2,0 V o mayor que 4,0 V, entonces es posible que uno o más nodos tengan un transceptor defectuoso.
Con un voltaje inferior a 2,0 V, es necesario comprobar la continuidad de los cables CAN_H y CAN_L.
Si el voltaje es mayor a 4,0 V, es necesario verificar si hay sobretensión.
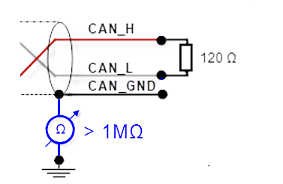
El blindaje de la red CAN solo puede conectarse a tierra en una ubicación. Esta prueba indica si el blindaje está conectado a tierra en varias ubicaciones.
Separar el escudo del suelo.
Mida la resistencia de corriente continua entre el blindaje y tierra.
Conecte el blindaje a tierra.
La resistencia debe ser superior a 1 MΩ. Si es inferior, deberá buscar una conexión a tierra adicional para el blindaje.
Los transceptores CAN tienen un circuito que controla CAN_H y otro que controla CAN_L. La experiencia ha demostrado que los daños eléctricos en uno o ambos circuitos pueden aumentar la corriente de fuga en estos circuitos.
Utilice un instrumento de medición de resistencia para medir la corriente de fuga.
Separar el nodo de la red. Dejar el nodo sin corriente.
Mida la resistencia de corriente continua entre CAN_H y CAN_GND.
Mida la resistencia de corriente continua entre CAN_L y CAN_GND.
Normalmente, la resistencia debería estar entre 1 MΩ y 4 MΩ o más. Si es inferior a este rango, es probable que el transceptor CAN esté defectuoso.
Manejo de errores de un controlador CAN
La gestión de errores está integrada en el protocolo CAN y es fundamental para el rendimiento de un sistema CAN. Su objetivo es detectar errores en los mensajes CAN para que el emisor pueda reenviar un mensaje fallido. Cada controlador CAN intenta detectar errores dentro de un mensaje. Cuando se encuentra un error, el nodo detector envía una bandera de error, interrumpiendo así el tráfico del bus. Los demás nodos detectarán el error causado por la bandera de error (si no han detectado ya el error original). Tomarán las medidas pertinentes y rechazarán el mensaje actual.
Estos contadores, así como el estado del bus, suelen proporcionar información inicial sobre la causa del error al diagnosticar errores CAN. Esta información se puede consultar en CODESYS mediante la interfaz de usuario así como la aplicación.