MC_Halt_SML (FB)¶
FUNCTION_BLOCK FINAL MC_Halt_SML
Commands a controlled motion stop.
The axis is moved to the state DiscreteMotion, until the velocity is zero.
When the output Done is set, the state is transferred to Standstill.
Note
MC_Halt_SML is used to stop the axis under normal operation conditions.
It is possible to start another motion command during deceleration of the axis,
which will abort MC_Halt_SML and will be executed immediately.
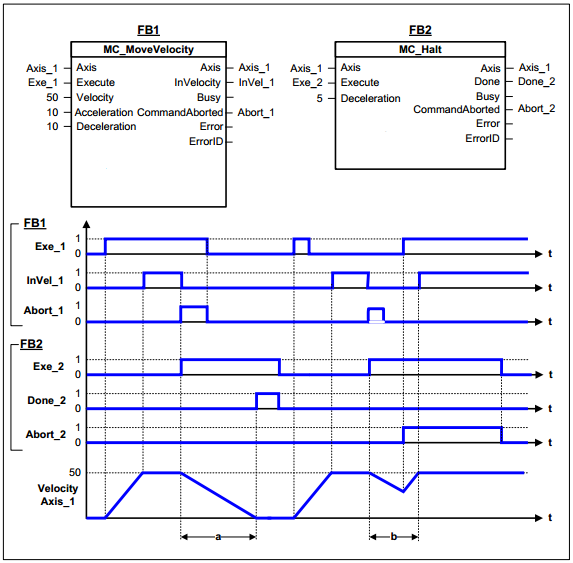
The example below shows the behavior in combination with MC_MoveVelocity_SML.
A rotating axis is ramped down with Function Block
MC_Halt_SMLAnother motion command overrides the
MC_Halt_SMLcommand.MC_Halt_SMLallows this, in contrast to MC_Stop_SML.
The axis can accelerate again without reaching Standstill.
- InOut:
Scope
Name
Type
Comment
Inout
AxisReference to the axis
Input
ExecuteBOOLRising edeg: The halt is started
DecelerationLREALValue of the deceleration (decreasing energy of the motor) [u/s²]
Output
DoneBOOLBecomes true as soon as the axis has reached velocity zero
BusyBOOLTRUEas long asMC_Halt_SMLis operating, reset when velocity is zeroCommandAbortedBOOLCommanded motion was interrupted by any motion FB acting on the same axis
ErrorBOOLSignals that an error has occured
ErrorIDError number