MC_PositionProfile (FB)¶
FUNCTION_BLOCK MC_PositionProfile
This function block follows a trajectory given by an array of (time, position) values.
Note
If
Axisdoes not reach standstill after this movement and no subsequent movement is commanded in the same cycle whenDoneis set, thenAxisswitches to theerrorstopstate and reports errorSMC_MOVING_WITHOUT_ACTIVE_MOVEMENT.The number of points of the profile is limited to 100. If more is required, MC_CamIn with a virtual master axis offers a much more flexible functionality, also supporting periodic operation and ramping in. See also the warnings below for further restrictions of this function block.
Example
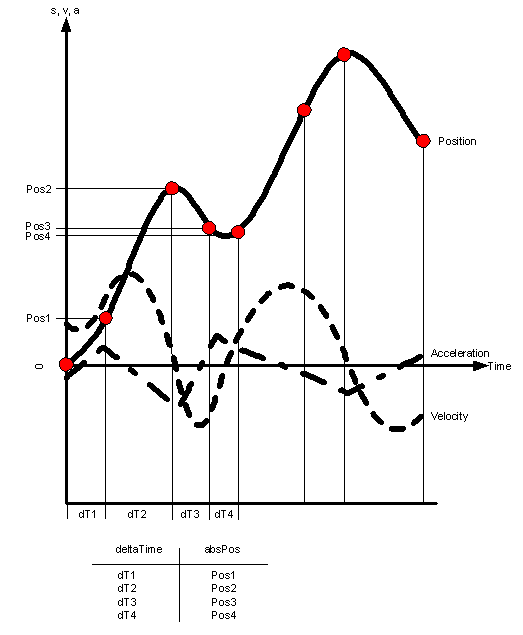
Time/Position profile¶
See also MC_VelocityProfile and MC_AccelerationProfile.
Warning
MC_MoveSuperimposed is not supported on top of
MC_PositionProfile.MC_SetOverride does not influence
MC_PositionProfileForecasts that are set up by SMC_SetForecast are not supported.
- InOut:
Scope
Name
Type
Initial
Comment
Inout
AxisReference to axis
TimePositionReference to time/position description
Input
ExecuteBOOLRising edge: Starts the execution of the function block.
ArraySizeINTDimension of the array
PositionScaleLREAL1
Overall position scaling factor
OffsetLREALOverall position offset ([u])
Output
DoneBOOLTRUE: The profile has been completed.BusyBOOLTRUE: The execution of function block has not been finished yet.CommandAbortedBOOLTRUE: The command has been aborted by another command.ErrorBOOLTRUE: Error has occurred within the function block.ErrorIDSMC_ERRORError identification