Additional Axes
Additional axes are axes which are part of the axis group but not part of the kinematics. They can be moved synchronously with the coordinated movement of the kinematics. The additional axes and the kinematics' axes start moving and reach their target position at the same time. Additional axis movements are buffered and blended together with coordinated movements. The same applies to pure additional axis movements, without any movement of the kinematics.
Differences compared to single-axis movements
The main difference compared to single-axis movements which are commanded with function blocks such as MC_MoveAbsolute or MC_MoveRelative is the synchronization of the movement. If synchronization is not important, then it could make sense to command the axes with single-axis function blocks because then the axes might be moved more quickly. Another difference is that additional axes are managed together with the axis group. They are enabled with SMC_GroupPower and errors can be reset together with MC_GroupReset. It should be noted that a single-axis error of an additional axis will lead to an axis group error.
Commanding additional axis movements
When commanding additional axis movements, you can always choose between absolute and relative movements, regardless of whether the main movement of the axis group is absolute or relative. For example, a relative additional axis movement can be commanded synchronously with an MC_MoveLinearAbsolute command.
Additional axis movements are commanded via the AdditionalAxes input of the motion function blocks for the axis group. For example, an absolute PTP movement with a relative additional axis movement can be commanded as follows:
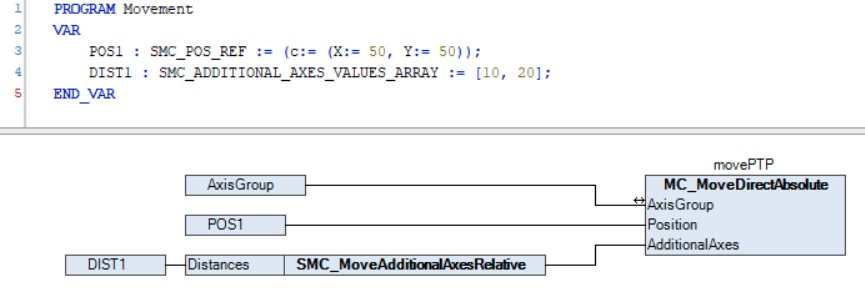
If only the additional axes should be moved, then a coordinated movement of length 0 (for example, MC_MoveDirectRelative with distance 0) can be commanded together with an additional axis movement.
Notes
Modulo axes are also supported as additional axes. They are always operated in
shortestmode for absolute additional axis movements.For more information, see the following: MC_DirectionMC_Direction
The maximum number of additional axes is limited by the library parameter
MAX_NUM_ADDITIONAL_AXESfrom theSM3_CPKernelDefaultslibrary. This parameter can be changed in the Library Manager.For an example on how to use additional axes, see the following: Using Additional Axes in Robotics