Zustände der Achsgruppe
Die nachfolgende Grafik zeigt die möglichen Zustände der Achsgruppe und die Übergänge zwischen den Zuständen.
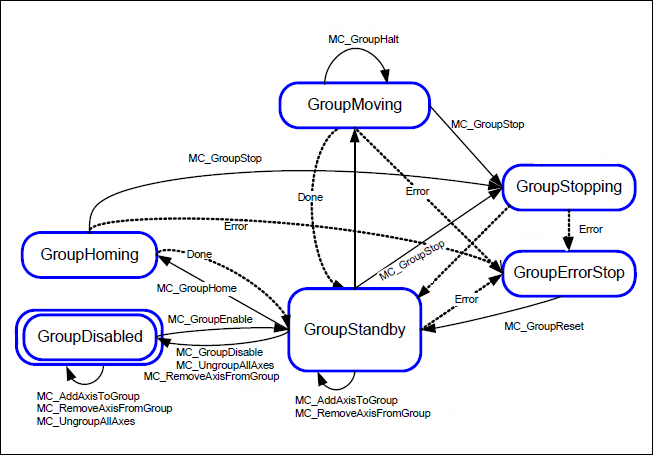
Die Fehler einzelner Achsen führen die Achsgruppe immer in den Zustand
GroupErrorStopWenn die Achsgruppe in den Zustand
GroupMovingschaltet, werden alle Achsen inSynchronizedMotiongeschaltetWenn die Achsgruppe von
GroupMovingnachGroupStandbyschaltet, werden alle Achsen instandstillgeschaltetWenn die Achsgruppe von
GroupMovingnachGroupErrorStopschaltet, werden alle Achsen inGroupErrorStopgeschaltetWenn die Achsgruppe in
GroupStandbyist, sind die Einzelachsen nicht unbedingt alle instandstill, da sie durch Einzelachsbewegungs-Funktionsbausteine wieMC_Joggesteuert werden können.Wenn eine Bewegung mit Fehler beendet wird, dann werden alle gepufferten Folgebewegungen mit
CommandAbortedabgebrochenSolange die Achsgruppe einem dynamischen Koordinatensystem folgt, bleibt sie in
GroupMovingDie Achsgruppe ist im Zustand
GroupMovinggenau dann, wenn die Gruppe koordiniert bewegt wird, also durch einen der Bewegungsbausteine von Part 4. Das Umschalten vonGroupMovinginGroupStandbyerfolgt einen Zyklus nach der letzten Positionsänderung.