Gekoppelte Antriebsgeräte
Gekoppelte Antriebsgeräte gehören zu einem Gerät, das den Antrieb innerhalb der Feldbustopologie repräsentiert. Die Piktogramme dieser Antriebe sind um kleine Zeichen erweitert, die den zugehörigen Feldbustyp andeuten. Beispielsweise ist jeder Standard-Servoantrieb durch einen Feldbus mit der Steuerung verbunden.
Für die Verwendung von Antrieben bietet CODESYS SoftMotion spezielle Gerätebeschreibungen für die Feldbusmaster (Endung „_SoftMotion“) an. Diese besitzen für den Antrieb optimierte Grundparameter.
Wichtig
Bei Antrieben, die mit CODESYS SoftMotion verwendet werden, muss das Modulo-Handling im Antrieb deaktiviert werden. Das Modulo-Handling wird von CODESYS SoftMotion in der Steuerung durchgeführt. Der maximale Verfahrbereich sollte nach Möglichkeit auf 32 Bit eingestellt werden.
Gekoppeltes Antriebgerät (EtherCAT) einfügen
Voraussetzung: Sie haben in Ihrem Projekt eine SoftMotion-kompatible Steuerung eingefügt.
Selektieren Sie die SoftMotion-Steuerung im Gerätebaum.
Wählen Sie den Befehl aus dem Kontextmenü.
Wählen Sie im Dialog Gerät anhängen das Gerät aus.
Klicken Sie auf die Schaltfläche Gerät anhängen.
Das Gerät wird zum Gerätebaum hinzugefügt. Der Dialog Gerät anhängen bleibt geöffnet.
Selektieren Sie das neu eingefügte Gerät im Gerätebaum.
Wählen Sie im Dialog Gerät anhängen einen SoftMotion-Slave aus ().
Klicken Sie auf die Schaltfläche Gerät anhängen.
Das Gerät wird zum Gerätebaum hinzugefügt.
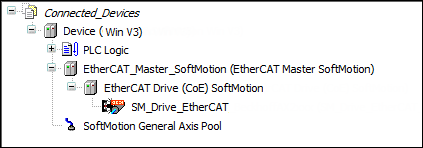
Durch Doppelklick auf das Gerät öffnet sich der zugehörige Geräteeditor.