Zusätzliche Spline-Achsen A, B, C
G-Code Wort: A, B, C
Funktion: Mit A, B und C legen Sie die Zielpositionen für zusätzliche Spline-Achsen fest. Diese Achsen sind ähnlich wie P, Q, U, V und W. Während P, Q, U und V linear interpoliert werden, werden A, B und C mit einem Polynom vom Grad 3 interpoliert.
Tipp
Die Verwendung von
A,BoderCschließt die Verwendung der zusätzlichen AchsenU,VundWaus, weilU,VundWdann den Gradienten definieren.Die Achsen
A,BoderCkönnen mit den Bits 3, 4 oder 5 am EingangwAxisvonSMC_LimitDynamicsoderwAddAxisvonSMC_CheckForLimitsausgewählt werden.Die Funktionsbausteine
SMC_SmoothPath,SMC_SmoothMerge,SMC_SmoothBSplineundSMC_RecomputeABCSlopeslegt die Steigung der Zusatzachsen automatisch fest. Das heißt, die Definition vonU,VoderWist dann nicht notwendig.
G-Code
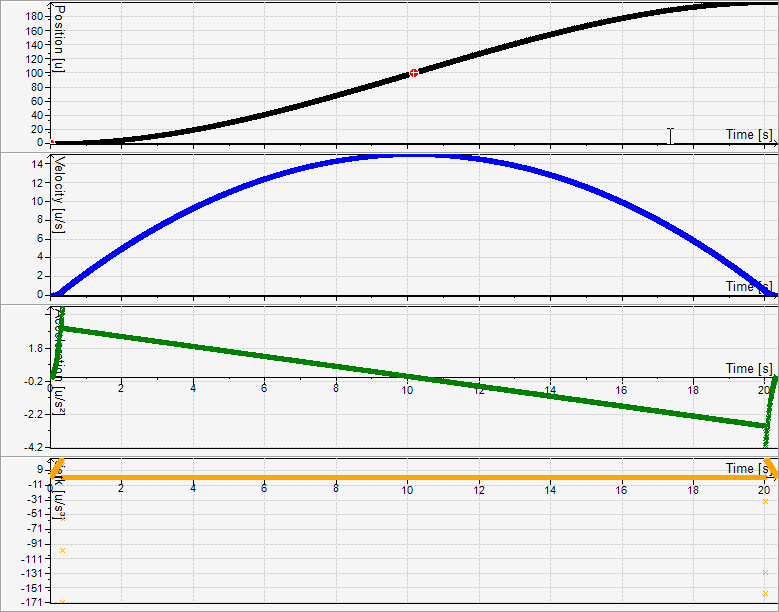
N10 G0 X0 A0 P0 F10 E30 E-30 N20 G1 X100 A100 P100
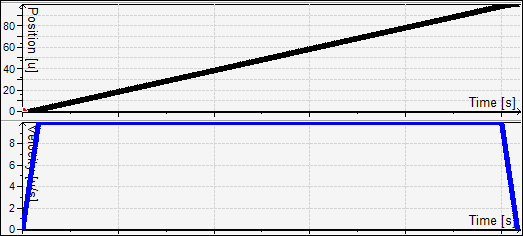
Die lineare Zusatzachse P wird linear zum gefahrenen Weg interpoliert. Dementsprechend gibt ihr zeitliches Profil das der Bahngeschwindigkeit wieder.
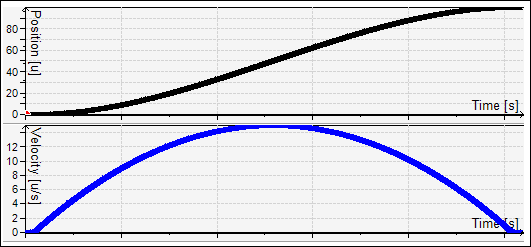
Die zusätzliche Spline-Achse A wird als Polynomfunktion interpoliert.
Die Verwendung der Spline-Funktion ist insbesondere dann nötig, wenn eine Bahn mit stetigen Tangentenübergängen verwendet wird, die der Interpolator nicht auf Geschwindigkeit 0 bremsen muss:
G-Code
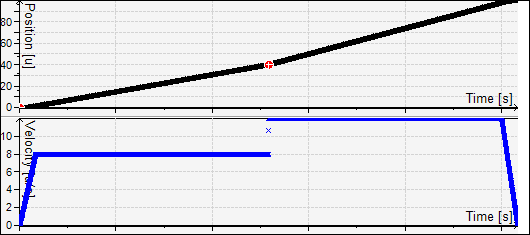
N10 G0 X0 A0 P0 F10 E30 E-30 N20 G1 X50 A40 P40 N30 G1 X100 A100 P100
Im linearen Fall sieht man einen Sprung in der Geschwindigkeit, der daher kommt, dass im ersten Abschnitt auf 50 Wegeinheiten 40 Einheiten der Zusatzachse verfahren werden; im zweiten Abschnitt auf 50 Wegeinheiten 60 Zusatzachseneinheiten. Da sich die Bahngeschwindigkeit nur nach dem Weg im kartsischen Raum (X Y Z) definiert, bewirkt eine konstante Geschwindigkeit in X einen Geschwindigkeitssprung in P:
Die Spline-Achse zeigt folgendes Profil:
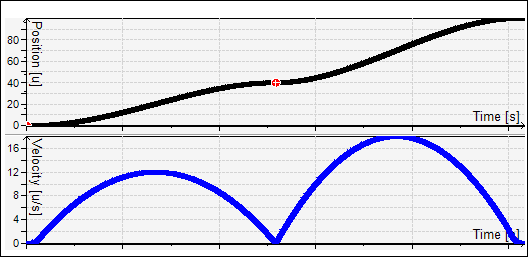
Die Steigung der Achsen A, B und C an der Endposition kann über das U-, V- und W-Wort definiert werden. Die Einheit der Steigung ist Wegeinheit der Zusatzachse pro Wegeinheit im Raum.
G-Code
N10 G0 X0 A0 F10 E30 E-30 N20 G1 X100 A100 U1.5 N30 G1 X200 A200 U0
Da dieses Programm einen stetigen Übergang zwischen N20 und N30 enthält, wirkt die vom Anwender programmierte Steigung (U=2) der A-Achse. Bei X=100 nimmt also die Position der A-Achse doppelt so schnell zu wie die Bahnlänge.