Zusatzachsen
Zusatzachsen sind Achsen, die Teil der Achsgruppe, aber nicht Teil der Kinematik sind. Sie lassen sich synchron zu koordinierten Bewegung der Kinematik verfahren. Die Zusatzachsen und die Achsen der Kinematik starten die Bewegung und erreichen gleichzeitig ihre Zielposition. Zusatzachsbewegungen werden gemeinsam mit koordinierten Bewegungen gepuffert und überschliffen. Das Gleiche gilt für reine Zusatzachsbewegungen ohne Bewegung der Kinematik.
Unterschiede zu Einzelachsbewegungen
Der Hauptunterschied zu Einzelachsbewegungen, die mit Bausteinen wie MC_MoveAbsolute oder MC_MoveRelative kommandiert werden, ist die Synchronität der Bewegung. Wenn die Synchronität nicht wichtig ist, dann kann es sinnvoll sein, die Achsen mit Einzelachsbausteinen zu kommandieren, da die Achsen dann möglicherweise schneller verfahren werden. Ein weiterer Unterschied ist, dass Zusatzachsen mit der Achsgruppe zusammen verwaltet werden: Sie werden mit SMC_GroupPower aktiviert und Fehler können mit MC_GroupReset gemeinsam zurückgesetzt werden. Zu beachten ist, dass ein Einzelachsfehler einer Zusatzachse zu einem Achsgruppenfehler führt.
Kommandierung von Zusatzachsbewegungen
Bei der Kommandierung von Zusatzachsbewegungen kann immer zwischen Absolut- und Relativbewegungen gewählt werden, unabhängig davon, ob die Hauptbewegung der Achsgruppe absolut oder relativ ist. Zum Beispiel kann synchron zu einem MC_MoveLinearAbsolute-Kommando eine relative Zusatzachsbewegung kommandiert werden.
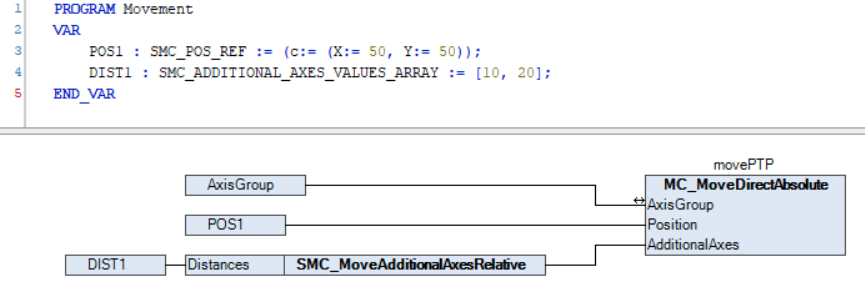
Zusatzachsbewegung werden über den Eingang AdditionalAxes der Bewegungsbausteine für die Achsgruppe kommandiert. Beispielsweise kann eine absolute PTP-Bewegung mit einer relativen Zusatzachsbewegung wie folgt kommandiert werden:
Wenn nur die Zusatzachsen bewegt werden sollen, dann kann eine koordinierte Bewegung mit Länge 0 (zum Beispiel MC_MoveDirectRelative mit Distanz 0) zusammen mit einer Zusatzachsbewegung kommandiert werden.
Hinweise
Es werden auch Modulo-Achsen als Zusatzachsen unterstützt. Sie werden bei absoluten Zusatzachsbewegungen immer im Mode
shortestverfahren.Für weitere Informationen siehe: MC_DirectionMC_Direction
Die maximale Anzahl von Zusatzachsen ist durch den Bibliotheksparameter
MAX_NUM_ADDITIONAL_AXESder BibliothekSM3_CPKernelDefaultsbeschränkt. Dieser Parameter kann im Bibliotheksmanager verändert werden.Ein Beispiel für die Verwendung von Zusatzachsen finden Sie hier: Verwendung von Zusatzachsen in der Robotik