Verwendung von Zusatzachsen in der Robotik
Das Beispielprojekt Robotics_AdditionalAxes.project zeigt, wie Zusatzachsen in der Robotik konfiguriert und verwendet werden. Zusatzachsen sind Achsen, die synchron zu koordinierten Bewegungen des Roboters bewegt werden.
Sie finden das Projekt im Installationsverzeichnis von CODESYS unter ..\CODESYS SoftMotion\Examples.
Aufbau der Applikation
Die Achsgruppe ist im Objekt AxisGroup konfiguriert. Es wird ein Scara-Roboter mit 3 Achsen (zwei rotatorische Achsen und eine lineare Z-Achse) verwendet.
Außerdem sind unter Zusatzachsen zwei Zusatzachsen eingefügt und mit den beiden Achsen DriveAdd1 sowie DriveAdd2 verknüpft.
Das Programm PLC_PRG enthält eine einfache Zustandsmaschine für den Programmablauf. Zuerst wird in Zustand 0 die Achsgruppe aktiviert, dann wird eine PTP-Bewegung auf Position (X=50, Y=50) durchgeführt. Diese wird schließlich in eine Linearbewegung zur Position (X=50, Y=-50) überschliffen.
Bei der ersten Roboterbewegung wird eine relative Zusatzachsbewegung mit Distanz (10, 20) kommandiert. Bei der zweiten Roboterbewegung ist die Distanz der Zusatzachse (-10, -20).
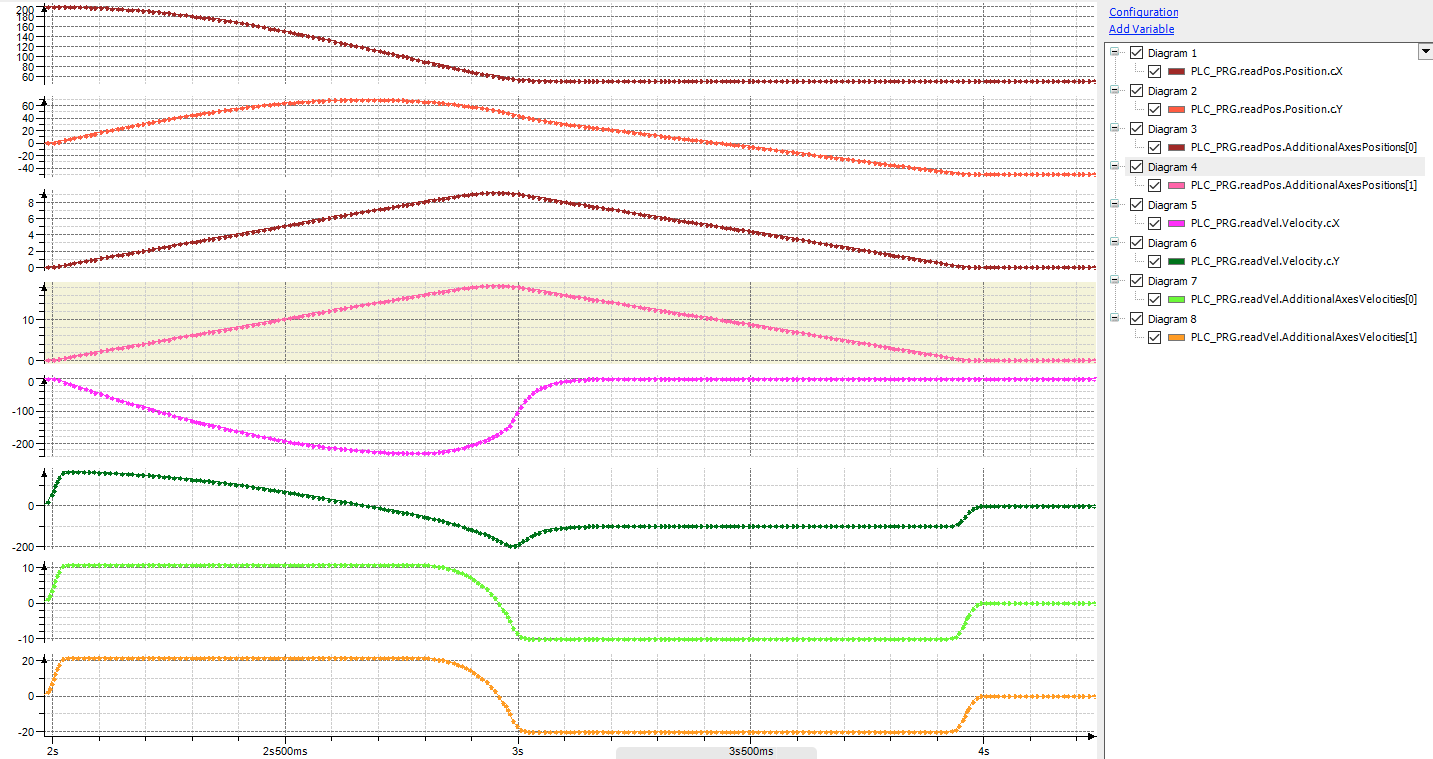
Mit den Bausteinen MC_GroupReadActualPosition und MC_GroupReadActualVelocity werden Position und Geschwindigkeit der Kinematik und der Zusatzachsen ausgelesen.
Inbetriebnahme
Übersetzen Sie die Applikation und laden Sie sie auf eine Steuerung.
Öffnen Sie den Trace und laden Sie ihn auf die Steuerung.
Starten Sie die Applikation.
Sie können die Bewegung der X- und Y-Koordinate sowie der beiden Zusatzachsen im Trace nachvollziehen