Verwendung
Einschränkung
Die CODESYS EtherCAT Version 4.10.0.0 weist einen bekannten Fehler bei der Funktion "PDO-Info vom Gerät laden" auf, der die ordnungsgemäße Funktion mit dem CODESYS SoftMotion Stäubli Support-Package verhindert.
Bitte verwenden Sie stattdessen eine ältere oder neuere Version von CODESYS EtherCAT.
Die nachfolgende Anleitung beschreibt beispielhaft die Konfiguration eines Stäubli-Roboters in der CODESYS Development System-Entwicklungsumgebung.
Legen Sie ein neues Standardprojekt für Ihre Steuerung an:
Wählen Sie eine Programmiersprache Ihrer Wahl aus.
Wählen Sie für ihre Steuerung eine Gerätebeschreibung aus.
Fügen Sie die EtherCAT-Antriebe hinzu:
Öffnen Sie das Kontextmenü des Knotens
Deviceim Gerätebaum und wählen Sie den Befehl Gerät anhängen aus.Der Dialog öffnet sich.
Wählen Sie dort den Feldbus
EtherCAT Master SoftMotion(unter Feldbusse → EtherCAT → Master ) aus. Bestätigen Sie die Auswahl mit einem Klick auf den Befehl Gerät anhängen, lassen Sie den Dialog jedoch noch offen.Im Gerätebaum erscheint der neue Knoten
EtherCAT_Master_SoftMotion.Klicken Sie im Projektbaum auf diesen Knoten.
Die Auswahlmöglichkeiten im Dialog Gerät anhängen ändern sich.
Wählen Sie Ihren Stäubli-Roboter aus. Sie finden Ihn unter Feldbusse → EtherCAT → Slave → Staubli robotics. Bestätigen Sie Ihre Auswahl mit Gerät anhängen und schließen Sie den Dialog.
Unter dem Knoten
EtherCAT_Master_SoftMotionwurden ein Knoten für den Roboter sowie weitere Knoten für die seine Antriebe angelegt.
Aktivieren Sie die Experteneinstellungen des EtherCAT-Knotens für den Roboter:
Doppelklicken Sie (im Gerätebaum unter dem Knoten
EtherCAT_Master_SoftMotion) auf den Roboter.Der Editor öffnet sich.
Aktivieren Sie dort die Option Experteneinstellungen.
Für weitere Informatinen siehe: Registerkarte: EtherCAT-Slave – Allgemein
Prüfen Sie, ob auf Ihrem Stäubli CS 9 Controller bereits E/As konfiguriert sind.
Falls keine E/As a konfiguriert sind, müssen Sie für den Roboter den Produkt-ID-Check deaktivieren.
Der Stäubli CS9 Controller weist bei einer Konfiguration ohne E/As eine andere Produkt-ID auf als bei einer Konfiguration mit E/As.
Doppelklicken Sie (im Gerätebaum unter dem Knoten
EtherCAT_Master_SoftMotion) auf den Roboter-Knoten.Der Editor öffnet sich.
Deaktivieren Sie unter der Gruppe Startup-Überprüfung die Option Produkt-ID überpüfen .
Die folgende Konfiguration wurde bei einem
ts2_100_S1_D25_L200_ceiling_R4-Roboter vorgenommen.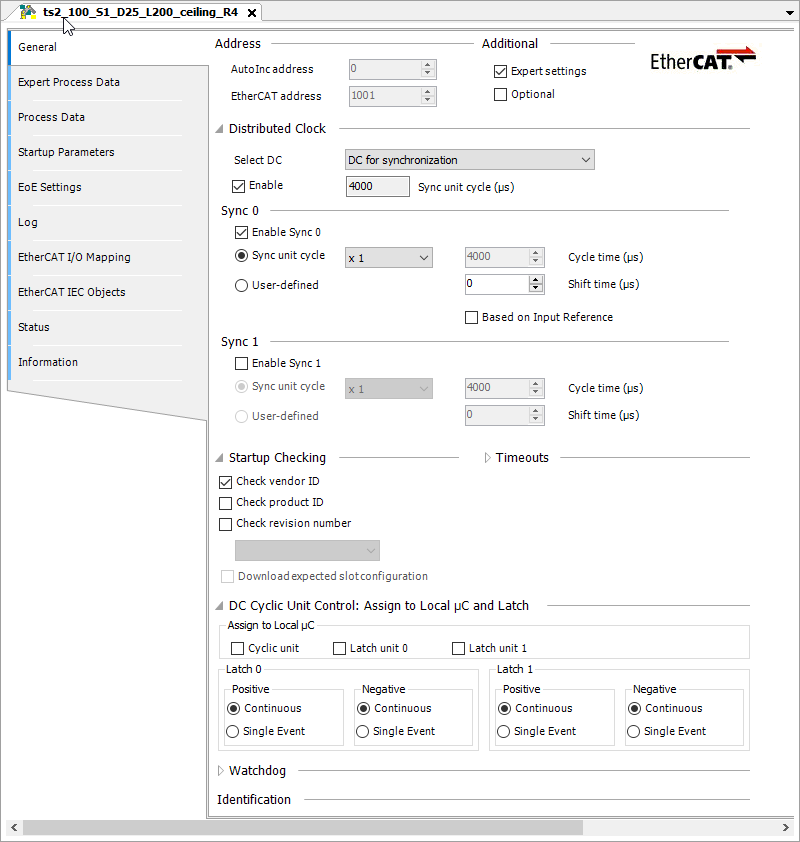
Falls bereits E/As konfiguriert worden sind, ist nichts zu tun. Gehen Sie zum nächsten Schritt über.
Übernehmen Sie die PDO-Konfiguration ins Projekt:
Öffnen Sie (unter dem Knoten
EtherCAT_Master_SoftMotion) den Editor des Roboters.Öffnen Sie dort die Registerkarte Prozessdaten Expertenmodus und deaktivieren Sie unter der Gruppe Download die Option PDO-Konfiguration.
Die folgende Konfiguration wurde bei einem
ts2_100_S1_D25_L200_ceiling_R4-Roboter vorgenommen.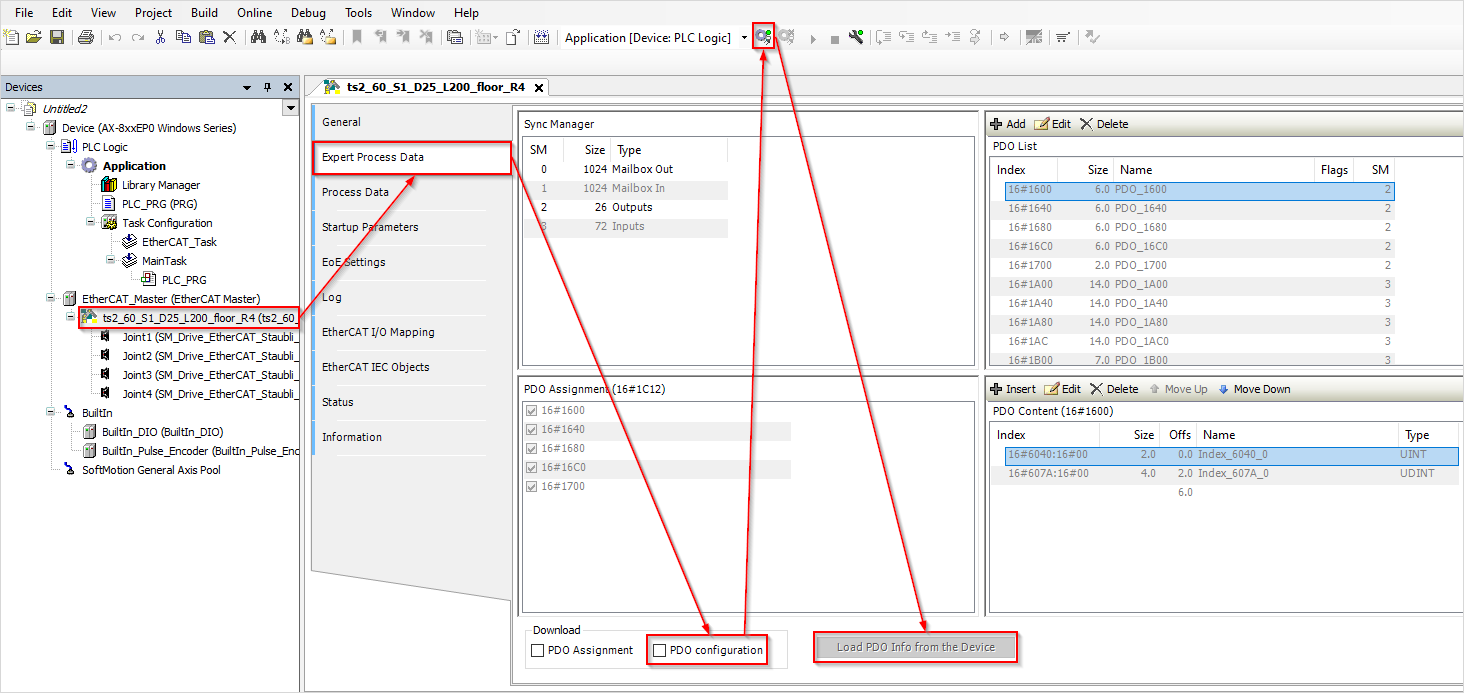
Loggen Sie sich auf der Steuerung ein, starten Sie die Applikation und warten Sie bis der EtherCAT-Strang hochgelaufen ist.
Klicken Sie nun auf die Schaltfläche PDO-Info vom Gerät laden.
Die PDO-Konfiguration des Roboters wird ins Projekt übernommen.
Loggen Sie sich von der Steuerung aus.
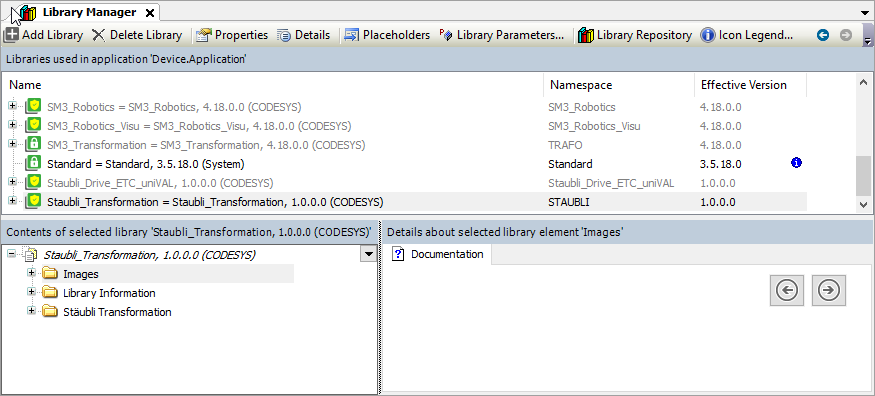
Fügen Sie die
Staubli_Transformation-Bibliothek zum Projekt hinzu.Öffnen Sie den Bibliotheksverwalter des Projekts.
Klicken Sie links oben auf die Schaltfläche Bibliothek hinzufügen.
Der Dialog öffnet sich.
Geben Sie dort in der Suchleiste den Text " Staubli_Transfomation" ein und fügen Sie die so gefundene Bibliothek hinzu.
Fügen Sie eine Achsgruppe ein:
Selektieren Sie im Gerätebaum den Knotens
Applicationund öffnen Sie das Konntextmanü. Wählen Sie den Befehl Objekt hinzufügen → Achsgruppe aus.Der Dialog Achgruppe hinzufügen öffnet sich.
Geben Sie eine Namen Ihrer Wahl ein und bestätigen Sie dies mit einem Klick auf die Schaltfläche Hinzufügen
Eine Achsgruppe wird unterhalb der Applikation eingefügt. Der Achsgruppenkonfigurator öffnet sich.
Klicken Sie auf die Schaltfläche Kinematik wählen.
Der Dialog Kinematik wählen öffnet sich mit einer Liste aller verfügbaren Kinematikbausteine und deren Beschreibungen.
Wählen Sie aus dieser Liste Ihren Robotertyp aus.
Weisen Sie in der Parametergruppe Achszuordnung den Achsen die in Schritt 2 hinzugefügten Antriebe zu.
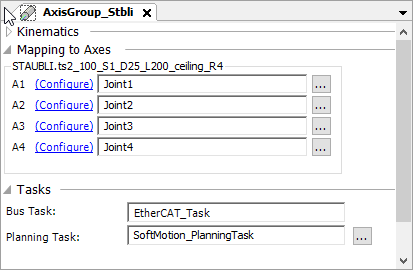
Wichtig
Bei den Antrieben der Stäubli-Roboter sind einige Eingabefelder gezielt ausgeblendet. Diese sind bereits vorkonfiguriert. Dazu gehören beispielsweise die Eingabefelder für dynamischen Limits einer Achse oder deren Skalierung.