Konfiguration und Inbetriebnahme
CODESYS SoftMotion Light-Konfiguration in CODESYS
Fügen Sie ein Antriebsgerät im Gerätebaum hinzu, beispielsweise ein geeignetes EtherCAT-Slave- oder CAN-Slave-Gerät.
Fügen Sie darunter eine CODESYS SoftMotion Light-Achse ein. Wählen Sie dazu den Befehl .
Öffnen Sie das eingehängte EtherCAT- oder CAN-Gerät im Editor (im gezeigten Beispiel Modul Accelnet).
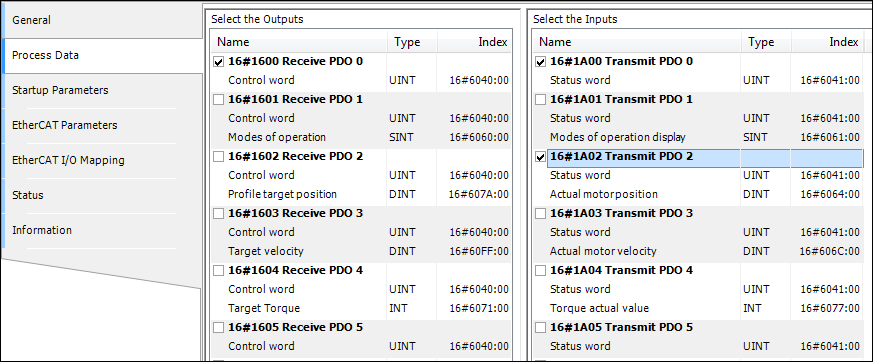
Konfigurieren Sie die Prozessdaten (PDO) des EtherCAT- oder CAN-Geräts.
Sie sollten die Prozessdaten so konfigurieren, dass das Status-Word und das Control-Word bei Änderungen übermittelt werden, letzteres optional. Wenn das Control-Word nicht per PDO übertragen wird, wird es per SDO übertragen, sobald es sich ändert. Für modulare Achsen müssen Sie bei Verwendung von
MC_MoveAbsolute_SMLoderMC_MoveRelative_SMLdie aktuelle Position übermitteln. Sie können die aktuelle Position synchron oder bei Änderung übermitteln. Wenn die Position bei Änderung übermittelt wird, sollten Sie eine passende Inhibit Time konfigurieren, um zu häufige Übertragungen zu vermeiden. Es ist nicht nötig, andere Objekte per PDO zu übertragen.Beispiel für eine PDO-Konfiguration im EtherCAT-Geräteeditor:
Wechseln Sie auf die Registerkarte EtherCAT E/A-Abbild. Wählen Sie dort bei Variablen aktualisieren die Option Aktiviert 2 (immer in Buszyklus-Task).
Wechseln Sie auf die Registerkarte Allgemein
Für EtherCAT-Antriebe ist die Verwendung von verteilten Uhren (Distributed Clocks) nicht nötig. Manche Antriebe brauchen sie aber eventuell.
Tipp
Für CAN-Antriebe sollten Sie Heartbeat aktivieren. Alternativ, beispielsweise wenn die aktuelle Position synchron übertragen wird, können Sie das SYNC-Telegramm aktivieren. In diesem Fall ist Heartbeat nicht erforderlich. Eine dritte Option ist, Node-Guarding zu verwenden. Die entsprechende Konfiguration erfolgt auf der Registerkarte Allgemein des CANopen-Slaves.
Wichtig
Wenn weder ein SYNC-Telegramm noch ein Heartbeat oder Node-Guarding aktiv ist, kann nicht feststellen, ob der Antrieb im Status „operational“ ist.
Öffnen Sie die CODESYS SoftMotion Light-Achse im Editor (im Beispiel SML_Drive_GenericDSP402).
Die Konfiguration ist ähnlich der einer CODESYS SoftMotion Light-Achse (siehe hierzu die Beschreibung zum SoftMotion-Geräteeditor).
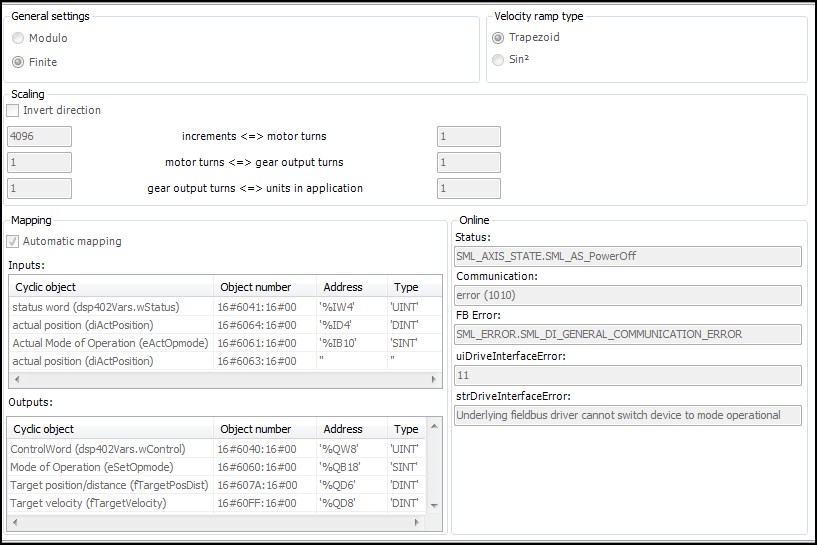
Stellen Sie folgende Parameter auf die RegisterkarteSoftMotionLight ein:
Allgemeine Einstellungen
Modulo: Modulowert [u] (Modulo-Periode) ein.
Begrenzt
Geschwindigkeitsrampentyp: Legt das Geschwindigkeitsprofil fest.
Trapezoid: Führt zu einem trapezförmigen Geschwindigkeitsprofil (mit konstanter Beschleunigung in jedem Abschnitt).
Sin²: Wenn vom Antrieb unterstützt, führt diese Einstellung zu einem durch die Funktion sin² beschriebenen Geschwindigkeitsprofil (mit stetigem Beschleunigungsverlauf).
Skalierung: Stellen Sie die Inkremente gegenüber den Einheiten in der Applikation ein.
Definieren Sie hier den Faktor für die Umrechnung der ganzzahligen Positionswerte (Inkremente) in die technischen Einheiten (Einheiten in Applikation). Die Positionswerte wurden vom Antrieb empfangen oder zum Gerät gesendet. Die technische Einheit wird vom IEC-Programm verwendet. Durch Einstellung der weiteren Parameter (Motorumdrehungen, Getriebeeingangsumdrehungen, Getriebeausgangsumdrehungen) können Sie zusätzlich ein Getriebe mit einbeziehen.
Richtung umkehren: Bewirkt, dass der Motor die vorgegebenen Werte mit umgekehrtem Vorzeichen erhält, also in entgegengesetzte Richtung dreht.
Wechseln Sie auf die Registerkarte EtherCAT E/A-Abbild des EtherCAT-Slaves. Überprüfen Sie das automatisch erzeugte Abbild von CODESYS SoftMotion Light-Parametern auf Adressen im Prozessspeicher. In Ausnahmefällen kann diese Zuordnung manuell angepasst werden.
Wenn Automatisches Mapping aktiviert ist, werden die Ein- und Ausgänge des EtherCAT-Slaves automatisch zugeordnet.
Inbetriebnahme
Im Onlinebetrieb werden in der Registerkarte SoftMotionLight des Antriebs Informationen zum Status, zur Kommunikation und zu Fehlern angezeigt.
Zur Unterstützung der Inbetriebnahme können Sie den Funktionsbaustein SML_StartupDrive (Bibliothek SML_Basic.library) und das Visualisierungstemplate VISU_SML_StartupDrive (in einer Visualisierung in einem Frame-Element einfügen) verwenden. Damit können Sie bequem auf die meisten CODESYS SoftMotion Light-Funktionen wie Power, Home, MoveAbsolute, MoveRelative, MoveVelocity und das Lesen und Schreiben von Parametern zugreifen.